Our design consisted of different parts to perform different roles
- Our main chassis, consisting of motors and treads to move around
- An arduino (mini-controller) to control these motors
- Raspberry Pis (mini-computers) to handle vision processing
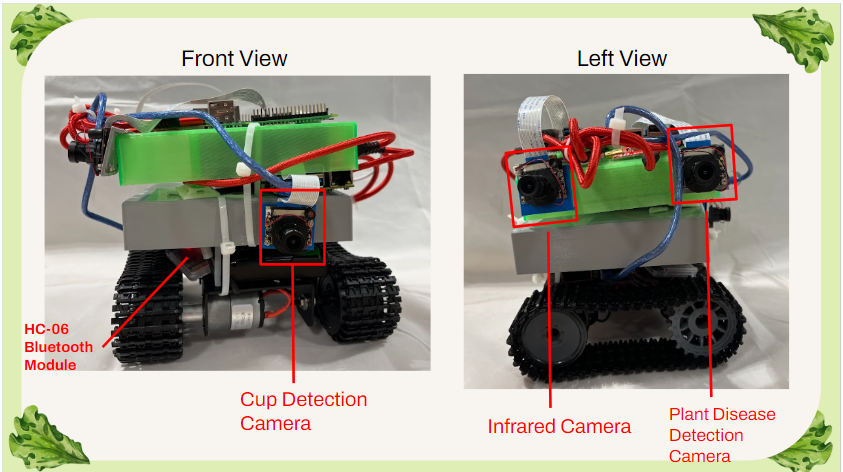
- Cameras to record plant in regular and infrared light
- A GPS module to locate where diseased/dying plants are
-
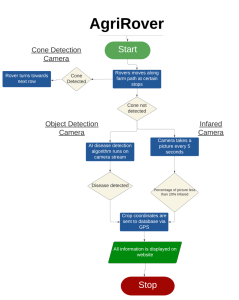
- A flowchart showing how our vision processing works.
-

- The diagram of our rover overall.
A core part of our project was the disease detection system. It used an infrared and normal camera that connected to Raspberry Pi’s (mini computers).
- The infrared camera would capture the infrared light reflecting off the plant to determine how healthy it was.
- The regular camera was connected to a trained AI model that would detect different diseases in plants.
- We collected a dataset of images of diseased plants with labels corresponding to what disease they had. We then trained an AI model that would learn how to classify which plants had diseases over time. At the end of the training process, we had a model that could look at different plants and determine certain diseases they might have
-

- Our plant disease detection model during training, as it gets more accurate.
-

- Our model correctly identifying this disease as a Corn rust leaf.
- Another part of the project was the mobility and navigation of the rover. This required an Arduino computer and motor driver connected to a set of motors and treads
- A camera on the rover connected to another AI model would look for a marker (cone) to simulate reaching the end of a row of crops and knowing when to turn into the next row



- The last component was data transfer. Once the diseased/unhealthy plant was marked, this data had to be displayed on a map that the user could view on a webapp. We accomplished this by storing the GPS coordinates and sending them to a cloud database (Firebase), this database would then be read by our webapp and display the coordinates on a map.
-

- The database containing all of our recorded GPS coordinates.
-

- Our webapp plotting the locations of diagnosed plants, the graph shown is based on the date recorded.