Hi there, welcome in! We are the 2022 DiffDrive Robot! Here is the detailed introduction of our project!
Motivation
Ant colonies send out scouts in order to find food sources. These scouts find food, bring a little back, and notify the rest of the colony about where they found the food. Later, many ants follow the path determined by the scout ant to return to the food and bring it all back to the colony.
Similar to ants in a colony, we aspired to build a robot that would be able to explore unknown terrain, locate a target and return home, then figure out the optimal path to take back to the target. These manifested themselves into our DiffDrive Robot Project.
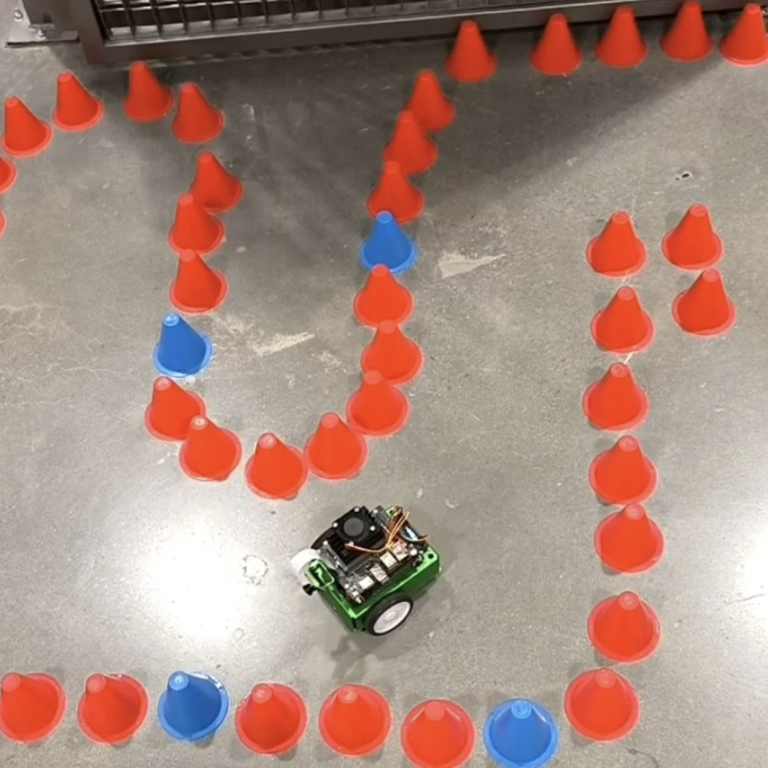
We aspired to create a robot capable of 1) exploring and solving a maze, 2) mapping the maze, and 3) calculating the most efficient path to solve the maze.
Learning Objectives
The team wanted to focus on developing skills in a few different areas, including Controls, Machine Learning and Computer Vision, Fastest Path Algorithms, Microcontroller Hardware, and ROS framework. These skills were broken down into the following areas of focus:
Controls
Distance Detection
CV Enabled Obstacle Avoidance
CV Enabled Maze Exploration
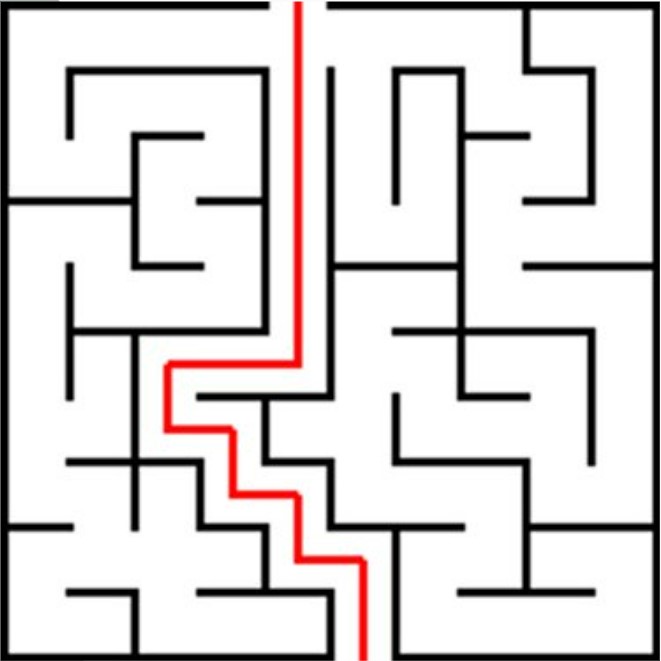
Shortest Path Algorithm (A*)
Structure Decomposition
Areas of Focus
Please click on the areas of focus to learn more!
Controls
Ultrasonic Distance Detection
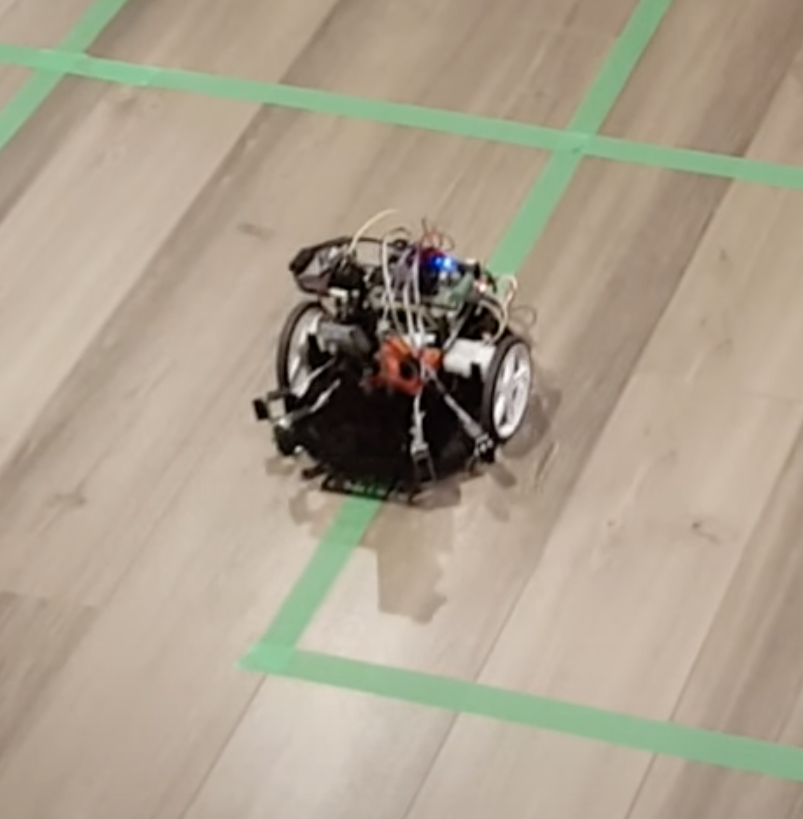
Obstacle Avoidance Using CV
Maze Exploration Using CV
Shortest Path Algorithm
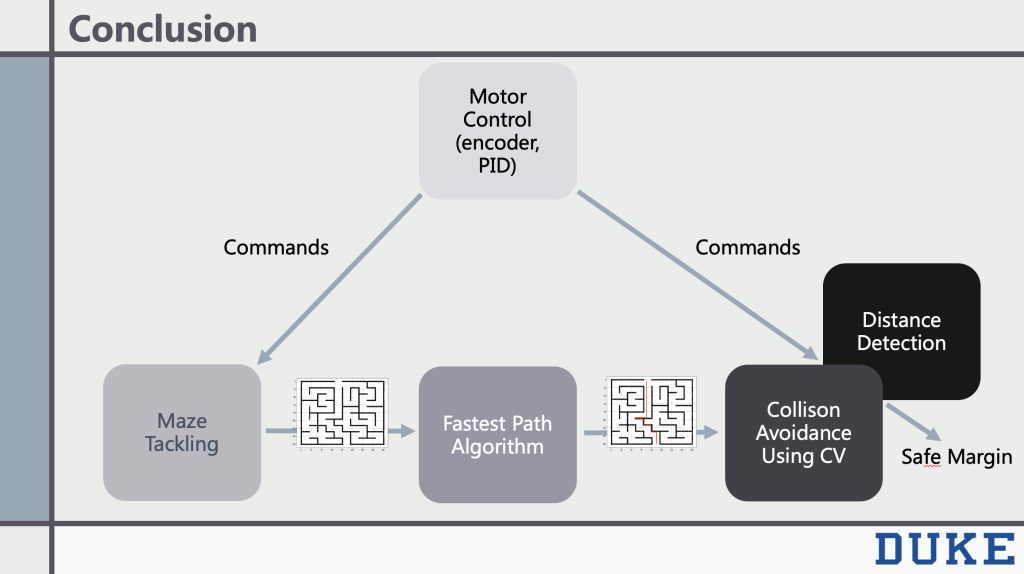
Conclusion
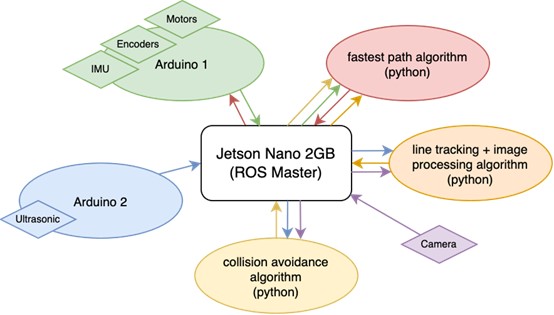
In a nutshell, the idea of our project is that we design our own motors, encoders, and PID control to send commands to the robot. With that signal, our robot is programmed to explore the maze in the first place. During the process, information of the maze will be collected to generate a picture of the empty maze. The picture will then be sent to the shortest path algorithm to find the optimal route. The route, bundled with encoder data, is then received by the Jetson Nano so that the robot can execute the shortest path. At this stage, the preprogrammed collision avoidance and distance detection will work together to ensure a safe margin to the boundary of the path. If everything works out, the robot eventually should be able to find its way back to the starting point without collision or interruption.
Future Work
Attempt to integrate all the parts together.
Transform encoder data into useful data.
Tune the robot to get the travel direction and filter out the noise.
Improve moving speed and turning angle with advanced PID control.
Attempt to integrate the Lidar into the robot and transfer data.