A proportional-integral-derivative (PID) controller is a system that controls variables to automatically maintain the set value and compensate for changes in process and environment. The proportional, integral and derivative term play different roles in this system.
- Proportional term: lower the proportional band outside which signal behaves non-linearly
- Integral term: calculate the sum of instantaneous error with time; could help eliminate the accumulated error from past calculations
- Derivative term: associated with the rate of change; could estimate the future error and foretell system actions
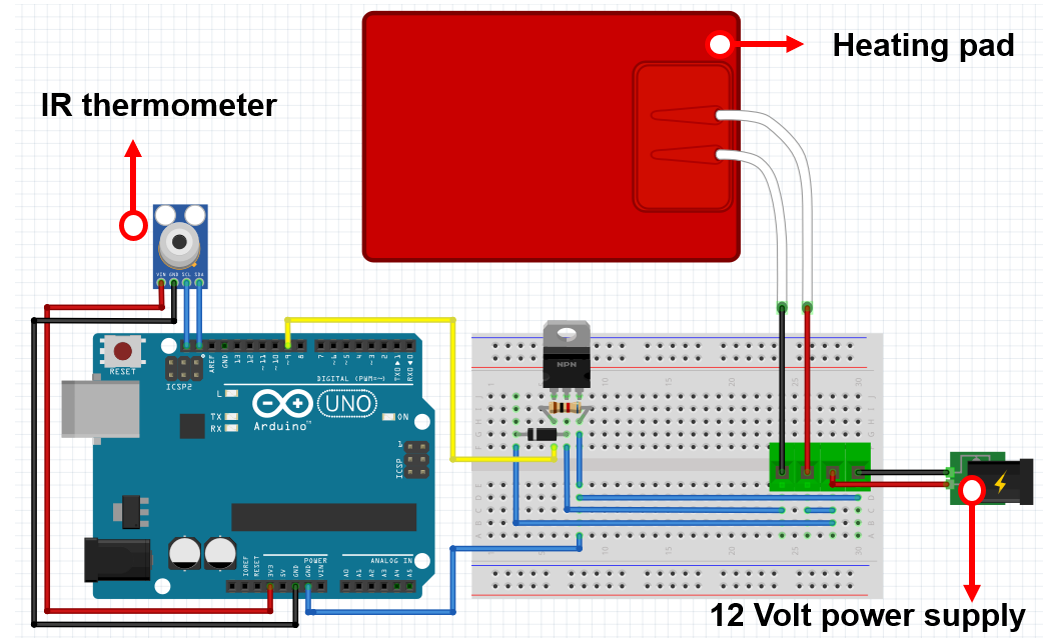
Wiring Schematic
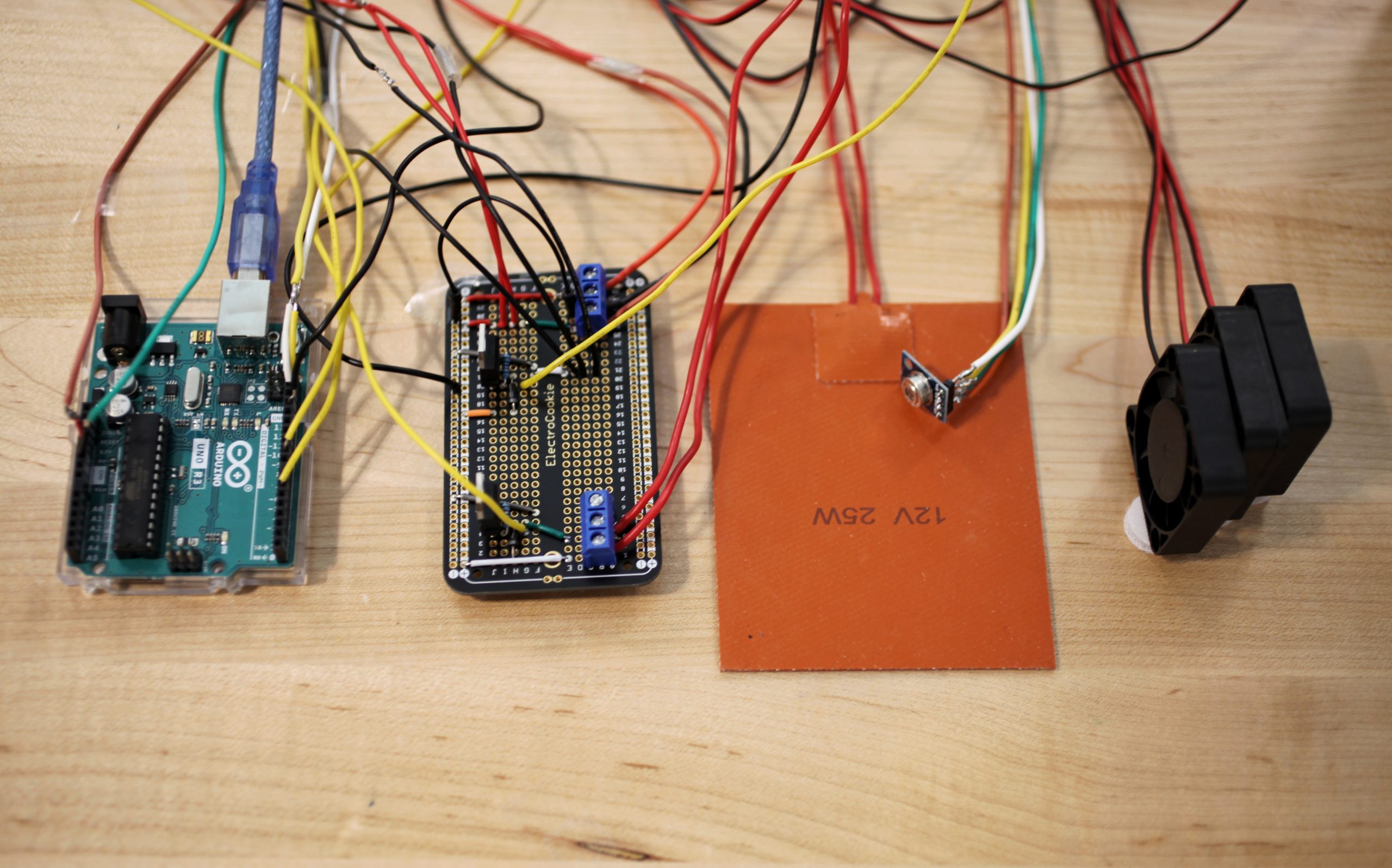
Physical Circuit
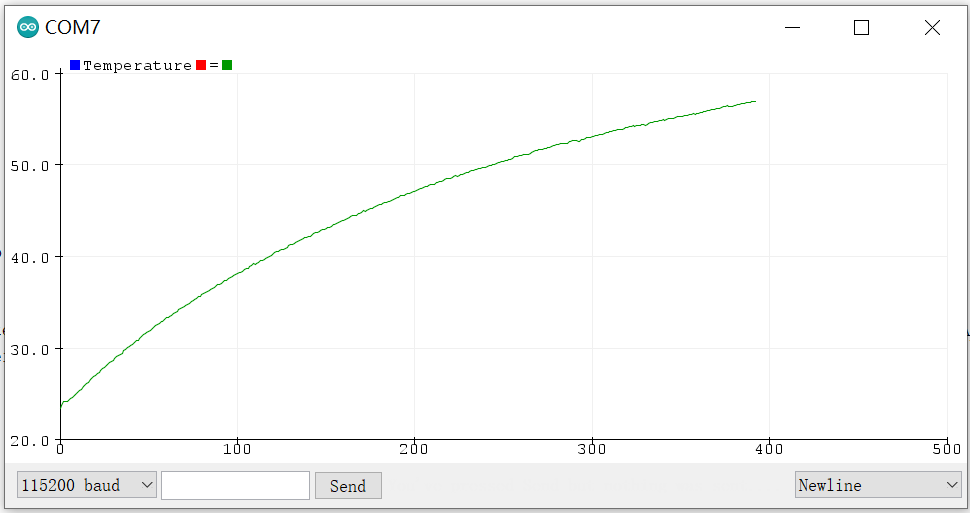
Step 1, obtain the heating and cooling speed of the heating pad under the full power.

Temperature Variation under Full Power (T/℃ vs. t/s)
Focus on the linear stage of temperature variation which is also the working range (20-50℃) of heating pad in this project.
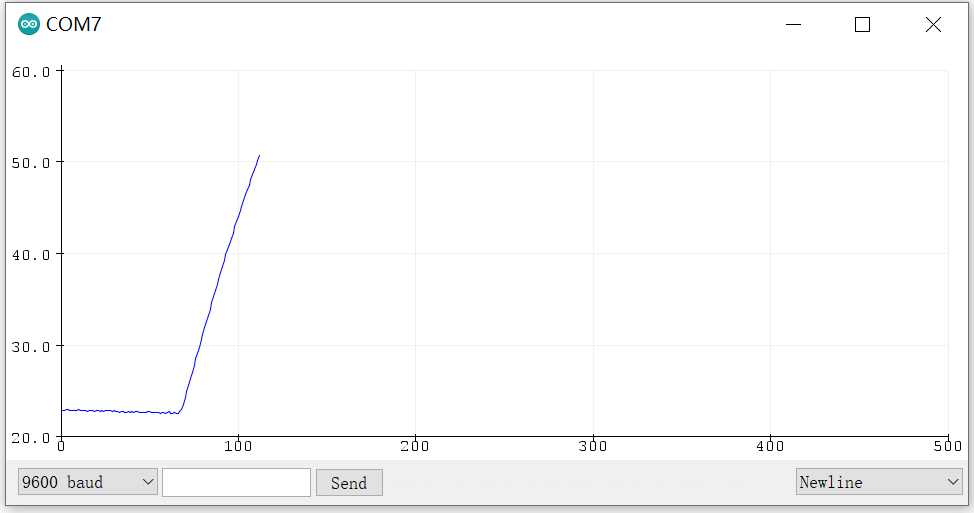
Temperature Variation of Working Range (T/℃ vs. t/s)
The rate of variation of linear stage is : 41s / (50-23) ℃ ≈ 1.5 s/ ºC
Step 2, define PID sampling time. The target accuracy is ± 0.5 ℃ [1]. The sampling time should be smaller than the change time of target accuracy and greater than the sensor’s response time. In this case, it is set to 0.5s.
Step 3, tune PID parameters so that the temperature of the heating pad could be stably maintained at the set point.
First determine the coefficient of proportional term Kp. Since overshooting doesn’t matter in this project, Kp could be relatively large. This figure shows temperature curve after adding proportional control to the system.
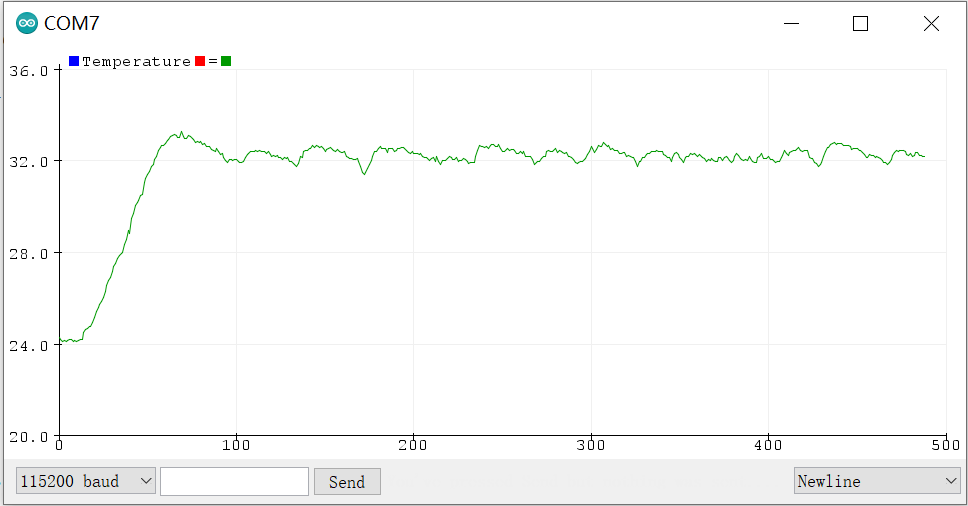
Temperature Curve with Proportional Term
Then adding derivative term to the controller. Since temperature control is a time lagging control, the derivative term is important to amend the time delay and get better response speed. In this system, the integral term leads to severe oscillation, so PD control is applied. The following figure shows the result of PD control. The set value is 32℃.