We designed two versions of microbots that can enable forward and backward movement.
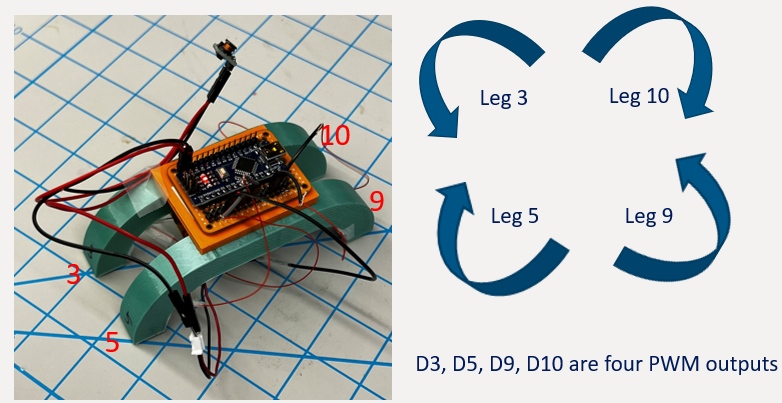
The first version of microbot
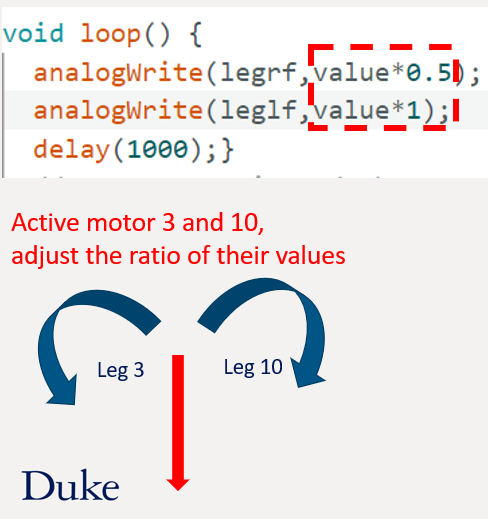
When we active the motor attached on the bottom of leg 3 and leg 10, counter-clockwise and clockwise rotation can be realize, respectively. So if we active these two motors together and adjust the ratio of their vibration amplitude, the microbot can move along a straight line. (move forward)
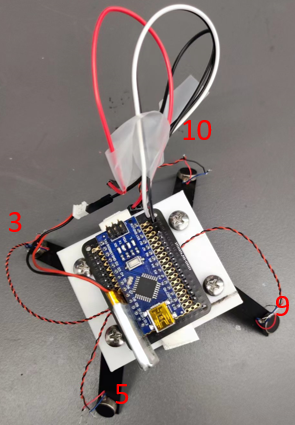
The second version of microbot
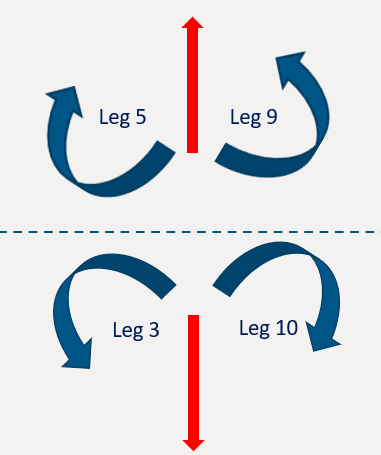
Similar to the first version, we find that when we active the motor attached on the bottom of each leg, respectively, counter-clockwise and clockwise rotation can be realize, respectively. Thus, if we active two motors on the leg 3 and leg 10, and adjust the ratio of their vibration amplitude, the microbot can move forward. Also, when we active two motors on the leg 5 and leg 9, and adjust the ratio of their vibration amplitude, the microbot can move backward. (see the following two vedios)