Work through this tutorial: Simple Ultrasonic Distance Measurer With LCD Display.This tutorial will teach you how to get started with HC-SR04 Ultrasonic in Arduino. This tutorial is the very basic building block for the rest of the project.
Here, follow the codes below to install the ROS on JetBot. 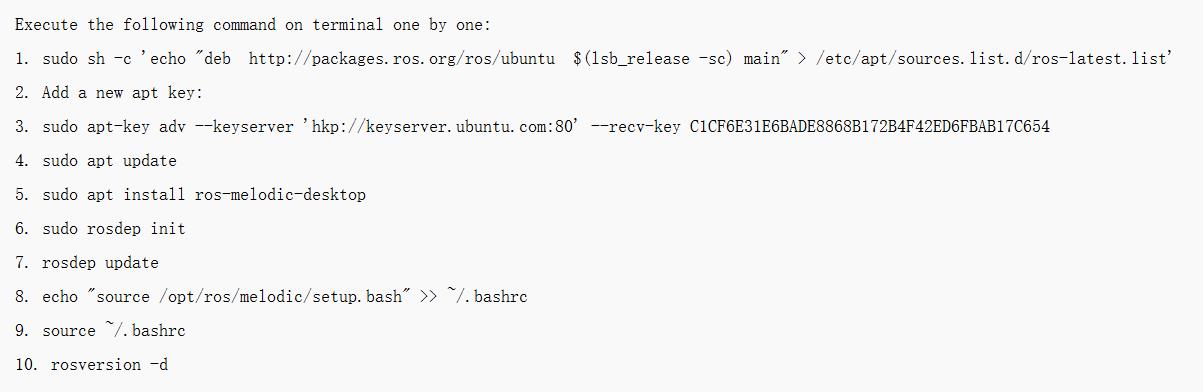
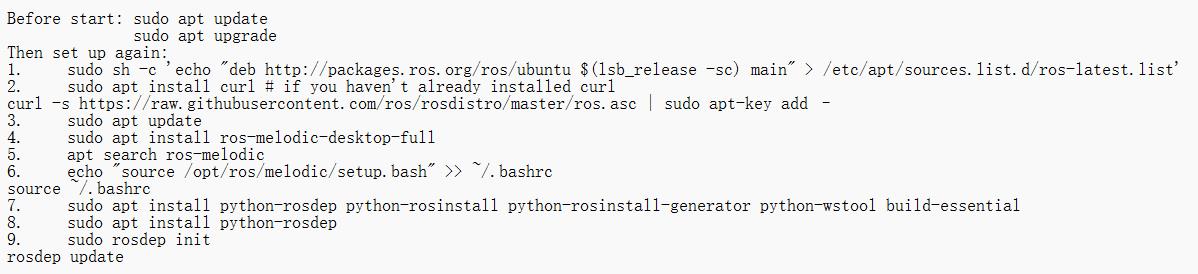
If you meet problems, make sure you have checked the ROS has successfully installed in the JetBot. Then try following codes.
Using terminal to type following commands and stream the data.
Step 1 : Open a terminal and type arduino (DO NOT CLOSE THE TERMINAL)
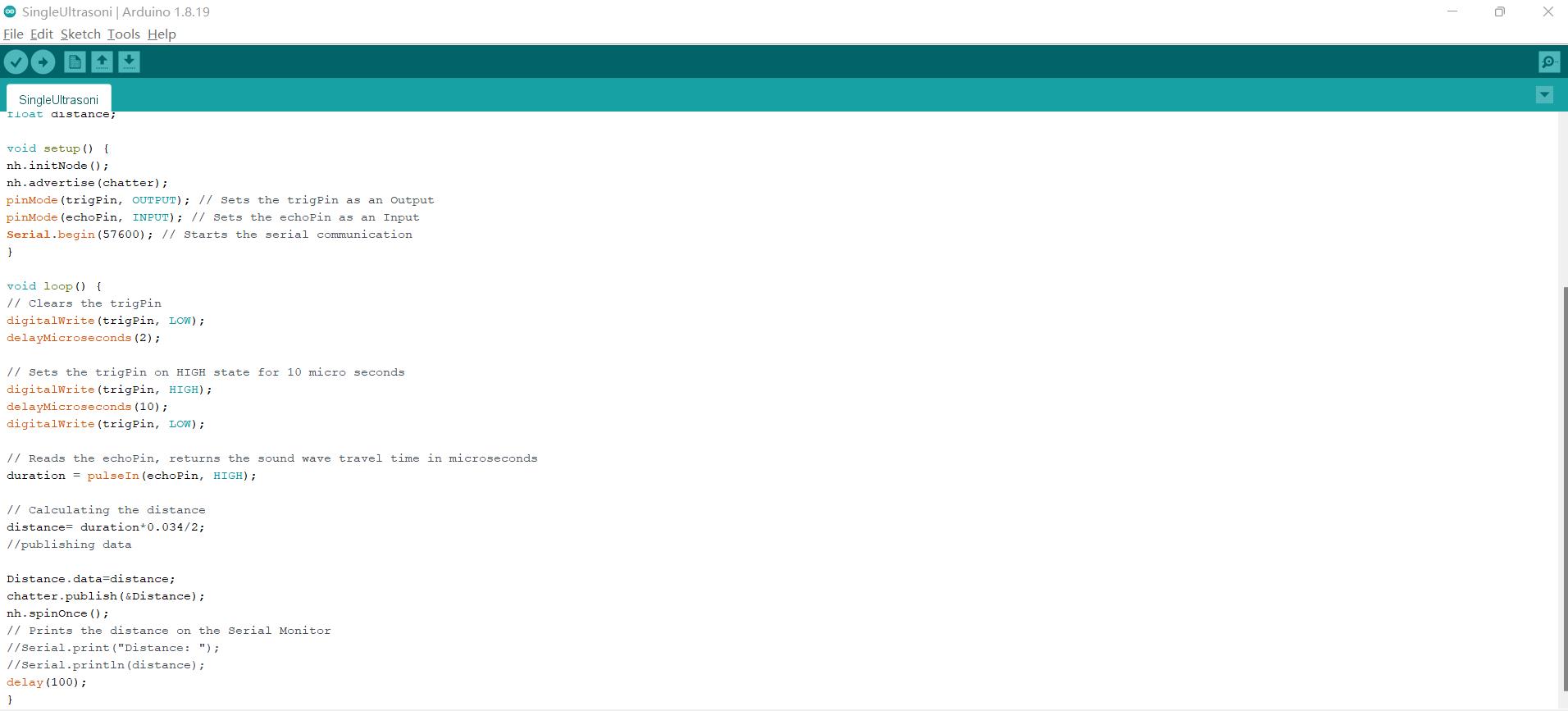
Step 2 : In Arduino, go to file-open-SingleUltrasonic in the sketch and upload the sketch. Code is here.
Step 3 : Open a new terminal and type the command roscore (DO NOT CLOSE THE TERMINAL)
Step 4 : Open another new terminal to access Jetson Nano USB ports for Serial Communication and type the the command (DO NOT CLOSE THE TERMINAL) rosrun rosserial_python serial_node.py /dev/(your port)
Step 5 : Open another new terminal to access Jetson Nano USB ports for Serial Communication and type the below command (DO NOT CLOSE THE TERMINAL) rostopic echo chatter
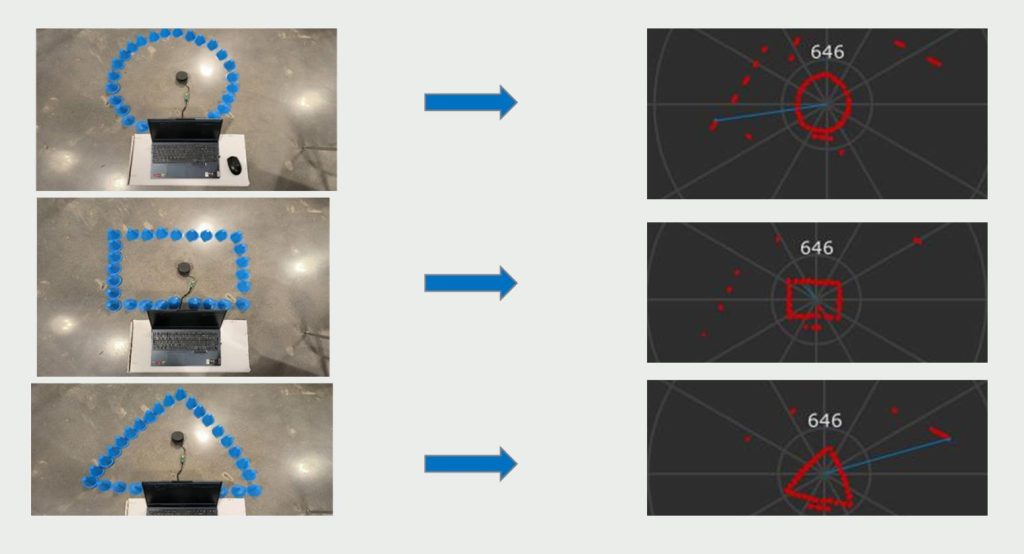
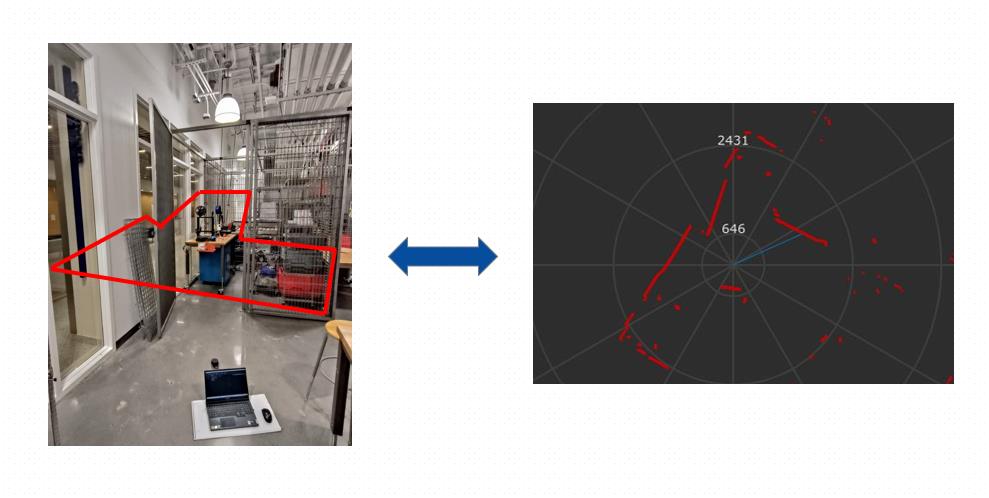
Connect the RPLIDAR A1M8 2D 360 Degree LIDAR Sensor with JetBot. Then initiate the software to detect the 360 degree environment with higher accuracy.
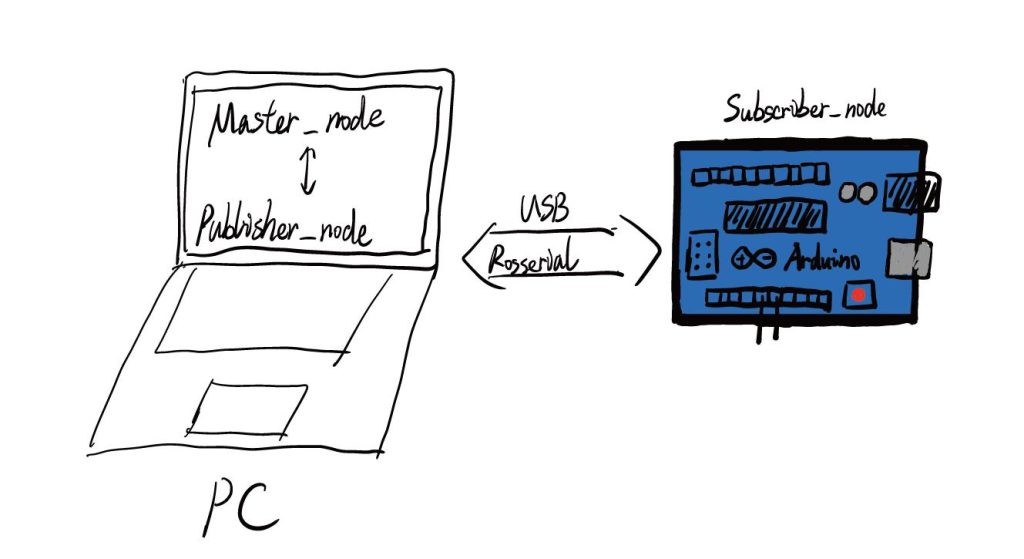
You can learn the structure of the ultrasonic and the principle of detection. Then get to know how to use ROS connect with Arduino.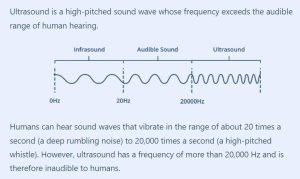

You need to control the ultrasonic sensor through Arduino Uno.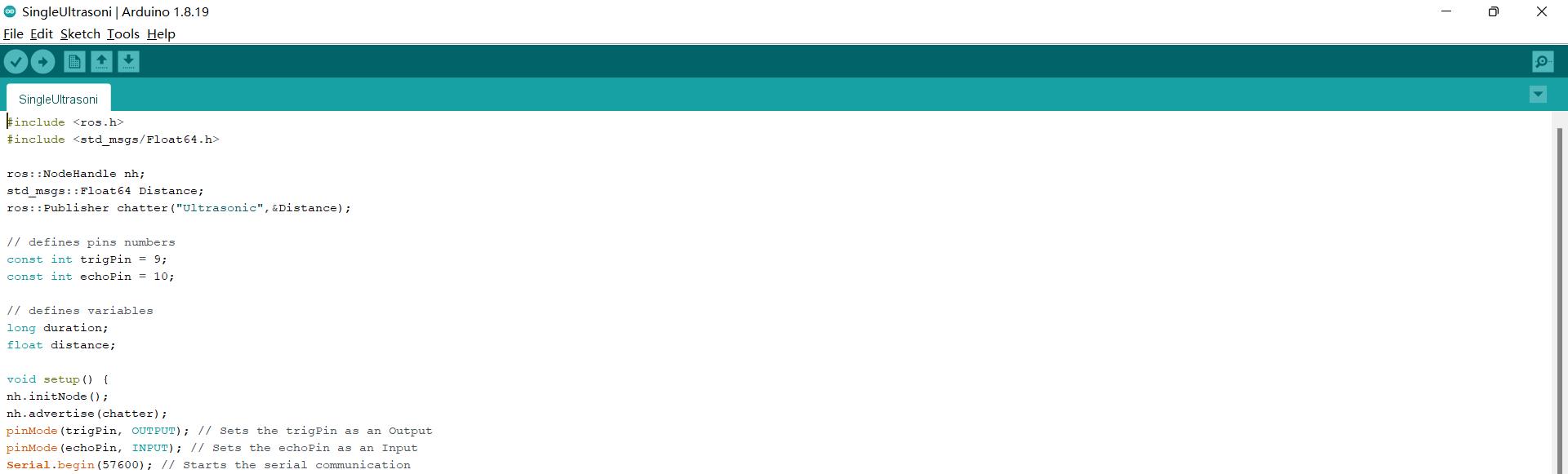
You can integrate the ultrasonic sensor into ROS system. Be assure the data can be transfered from Arduino to ROS. Also, make sure the data can be published and other part can get the data like the video shows.
With further increasing the accuracy of detecting the environment and assisting the driving. Using LiDAR sensor system to detect obstacles and collect data .