Beginner – Arduino Controlled Accelerometer and LCD
Accelerometer
Accelerometers are essential in robotic applications because they can be used to determine the location and orientation of various joints and end effectors.
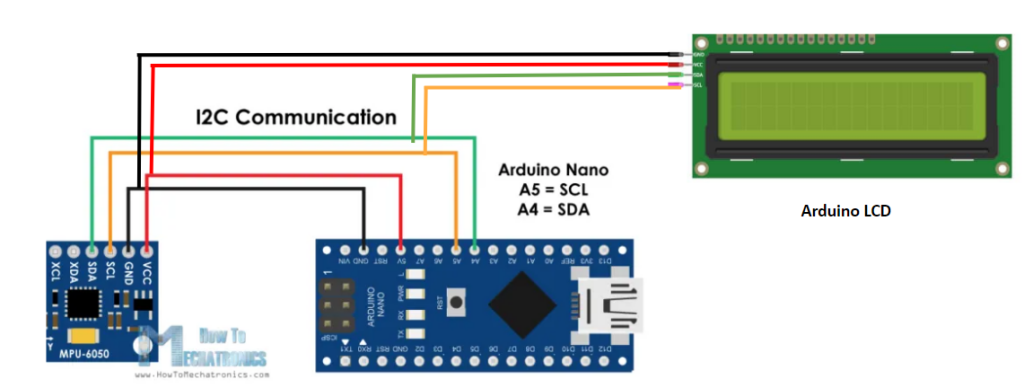
Therefore, an MPU6050 accelerometer, that provides acceleration data along 3 axes as well as gyroscopic data, was connected to an Arduino to observe the orientation change of a breadboard.
The output of the accelerometer data was also simulated in Processing which allowed a visualization of the breadboard orientation.
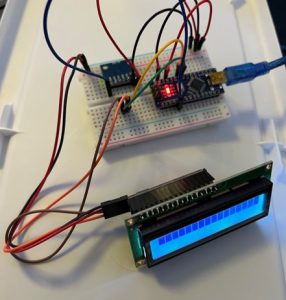
I added an additional LCD screen in order to allow a user to easily see the values being outputted by the accelerometer. Below is the circuit diagram and photo of the system.
The following video shows the visualization and output of the accelerometer data. There was minimal drift in the X and Y directions, but over time the z axis output would shift. This can be mediated by adding an additional filter.
About the Author
This page was written by Ankitha Durvasula. Check out her personal page here.