


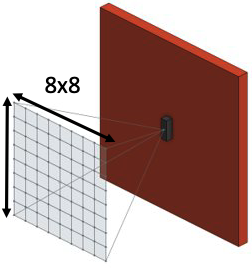
When plotting this 8×8 grid in 3D we can see clear trends from which we can determine bending and twisting data for our beam using a planar least squares regression. By fitting a plane to the data we obtain rotation (deflection of the beam) as well as distance to the center axis.
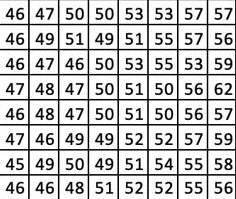
ToF Distance Output
The example raw distance output from the sensor doesn’t provide an easily identifiable trend with regards to the angle of our measured surface. When we plot the values in 3D, we can see a clear trend of the data, there is a slope to the data.

Initial 3D Plot of Distance
How do we obtain an angle from this data? We perform a Planar Least Squares Regression. With a plane fit to our data, we now can compare the orientation of that plane with respect to a base plane to establish an angle of rotation. By recording the distance to the center of the plane, we can also determine the amount the beam in our test rig has deformed as a result of pure bending.

Planar Least Squares