

In the circuit below, we have used three 20Ω resistors for the Red, Green and Blue Pins. When replicating this, you can alter the resistance to adjust the maximum brightness you want to achieve.
The following wiring diagram was created using Fritzing.
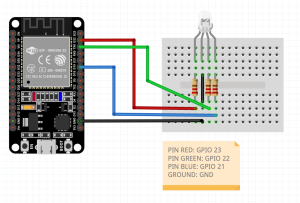
Circuit Diagram

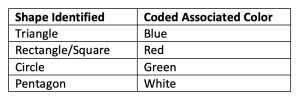
The video below shows an LED changing colors based on the shape detected by the ESP32 CAM (Camera not shown in the video).
In the computer screen you will be able to see a real-time video feed of the camera being pointed toward multiple shapes. The LED only changes colors when a shape has been identified correctly 10 times by the algorithm.