We designed two versions of microbots that can realize clockwise rotation and clockwise rotation.
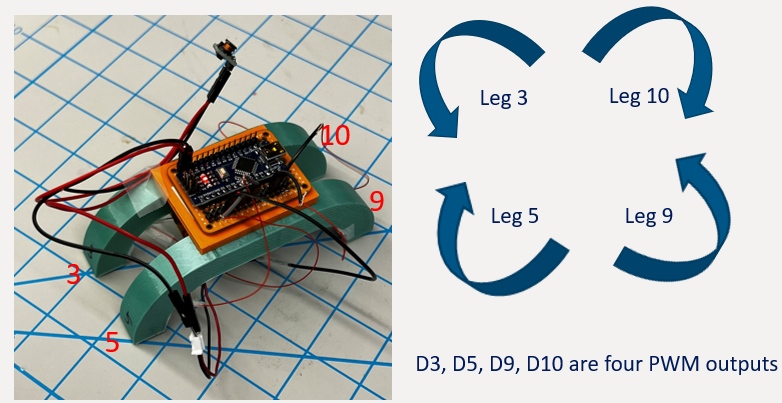
The first version of microbot
When we set a value for one PWM output and just activate one motor, we can realize clockwise rotation and counter-clockwise rotation respectively. As shown in the schematic above, when we just activate the motor attached on the leg 5 or leg 10, clockwise rotation is generated. But when we just activate the motor attached on the leg 3 or leg 9, counter-clockwise rotation is generated. The following four vedios show the rotation corresponding to activate different motors.
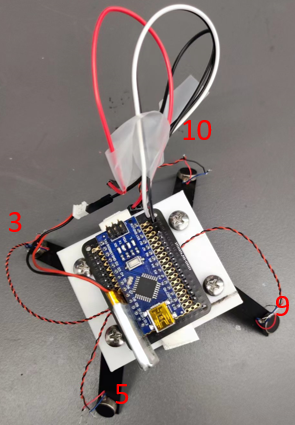
The second version of microbot
When we set a value for one PWM output and delay for 5s (activate one motors for 5s), then stop this output and set a value for another PWM output and delay for 5s, and repeat this process, which means we activate four motors for 5s in turn, we can realize clockwise rotation and counter-clockwise rotation in turn. (see the following vedio)