

Abstract
This project develops a pneumatic soft-finger system that can adapt its grasp in real time using embedded sensors and closed-loop pressure control. Each finger is cast from silicone using a multi-stage molding process and includes an internal pressure sensor, a fingertip force sensor, and a flex sensor that measures bending. A dual-pump actuation module inflates and deflates the finger while a controller adjusts pump commands based on sensor feedback. Together, Experimental results demonstrate that these components allow the soft finger to smoothly build contact, reach a target grasp force, and hold that force with minimal oscillation.
Background
Soft robotic hands are increasingly valued in the field for their ability to interact safely with objects of varying geometries, stiffnesses, and positions. Pneumatic fingers made from silicone elastomers naturally conform around objects, distributing contact forces and reducing the risk of damage during manipulation. To maximize the utility of these compliant structures, our design focuses on self-sensing actuators—embedding sensors into the soft robotics hand system. This approach enables closed-loop feedback control, allowing the system to monitor deformation and contact forces in real time

Preject Goals
Our primary objective was to develop a fully integrated pneumatic soft robotic system capable of stable and adaptive grasping through active feedback.
1. CAD & Molding Upgrades
We upgraded the CAD design to establish stronger adhesion between the silicone finger body and the pneumatic system, ensuring a robust seal to prevent air leakage. Additionally, we refined the fabrication process to significantly increase finger flexibility.
2. Multi-Modal Sensor Integration
Embed a unified sensing suite—including force sensing resistors (FSR), flex sensors, and pressure sensors—to continuously monitor grasp force, curvature, and internal chamber pressure, enabling real-time awareness of the finger’s physical state.
3. Closed-Loop Control Architecture
Implement a real-time control framework on an Arduino Mega that interprets sensor feedback to regulate a dual-pump pneumatic system (inflate/deflate), ensuring smooth pressure modulation and minimizing error between target and measured grasp force.
Team members


Shucheng JIA
Control Algorithm Design
Developed the closed-loop control system, dual-pump regulation algorithm, and sensor-integrated feedback architecture for real-time adaptive grasping.
Junxian ZHU
Designed the upgraded CAD geometry, soft-finger structure, and multi-step silicone molding process, improving flexibility and manufacturability.
Mingxi PAN
Material Science Analysis
Characterized silicone material behavior and analyzed experimental data to guide design refinement and validate system performance.
Motivation & Problem Definition
Soft robotic grippers offer natural compliance and safety, making them well-suited for interacting with objects of varying shapes and fragility. However, traditional pneumatic soft fingers lack sensing capability and operate in open-loop mode, resulting in unpredictable behavior and limited control accuracy. To advance soft robotic manipulation, this project seeks to integrate sensing, actuation, and feedback control into a unified pneumatic soft-finger system.
The motivation behind this work can be understood through three perspectives: the engineering need for a more capable soft-grasping system, the underlying scientific challenge of modeling soft materials, and the educational value of creating an accessible, hands-on platform for learning soft robotics. These considerations form the basis of the project’s problem definition:
Problem Statement
Soft grippers are compliant but typically lack awareness of how they interact with objects. By embedding bending, force, and pressure sensing directly into a silicone-molded actuator and controlling it through a real-time dual-pump system, this project aims to achieve stable, adaptive grasping for fragile objects with diverse geometries and stiffness levels.
Research Problem
Soft actuators exhibit nonlinear, pressure-dependent deformation that cannot be predicted using simple models. This work investigates whether a multi-sensor feedback loop can compensate for this nonlinearity, enabling predictable and repeatable grasp forces. Demonstrating this capability lays the foundation for future research in tactile object classification and adaptive grasp planning.
Educational Problem
The system is intentionally designed using low-cost, widely accessible components such as the Arduino Mega, mini air pumps, and 3D-printed molds. This creates a practical teaching platform for learning CAD design, silicone fabrication, sensor integration, and embedded control—making soft robotics more approachable for students.
Design criteria table

This table establishes the mandatory objectives and strict constraints—such as wall thickness tolerances and sensor sensitivity—that each subsystem must meet to ensure stable, adaptive grasping.
System Structure
The primary technical challenge lies in the nonlinear mechanical behavior of soft materials. Unlike rigid robots, the force output of a soft pneumatic actuator cannot be reliably predicted from air pressure alone. This project investigates whether embedding multi-modal sensing and applying a closed-loop feedback strategy can effectively compensate for this nonlinearity and produce consistent grasp performance. The resulting architecture establishes a foundation for future work such as tactile-based object classification or adaptive grasp planning for unknown objects.

Project System Breakdown
This project is organized into three primary subsystems—hardware, electronics, and software—which work together to enable adaptive pneumatic manipulation.
The hardware subsystem includes the silicone soft-finger actuators, the 3D-printed structural components, and the pneumatic interface (air chambers, hoses, and mounting fixtures). It encompasses all mechanical elements required to generate controlled deformation, including the upgraded CAD geometry, the multi-stage silicone molding process, and the rigid–soft interface that ensures airtight pneumatic performance.
Finger body system fabrication
Design Objectives The soft finger body serves as the system’s primary actuator, converting internal air pressure into controlled bending. The design prioritizes high compliance, utilizing a thin 1 mm wall thickness to minimize material stiffness. This geometry allows the finger to achieve a maximum bending angle of 45°, enabling it to effectively grasp objects.

Finger body Principle:
The finger’s movement relies on a concept called asymmetric elongation, which works because of the actuator’s specific shape. As shown in the cross-section design, the finger is split into two main parts: a top section with a wavy “bellows” structure for the air chambers, and a bottom layer that is just a solid, flat strip. When we pump air into the chambers, the pressure forces the folded bellows on top to expand and lengthen, but the stiffer bottom layer stays the same length. This difference creates a bending moment that curls the finger toward the flat bottom side, allowing it to grasp the targeting object steadily.
Material Selection:
We chose Smooth-Sil 945 for the finger body because its Shore 45A hardness provides the right balance between flexibility and strength. The material is soft enough to bend easily when pressurized, but rigid enough to prevent the thin 1 mm chamber walls from bulging out or “ballooning”. This ensures that the air pressure effectively turns into bending motion rather than just deforming the finger’s shape, while also being durable enough to handle repeated use
Finger body fabrication:
To achieve the complex internal geometry required for the pneumatic chambers, we developed a two-step silicone molding process:

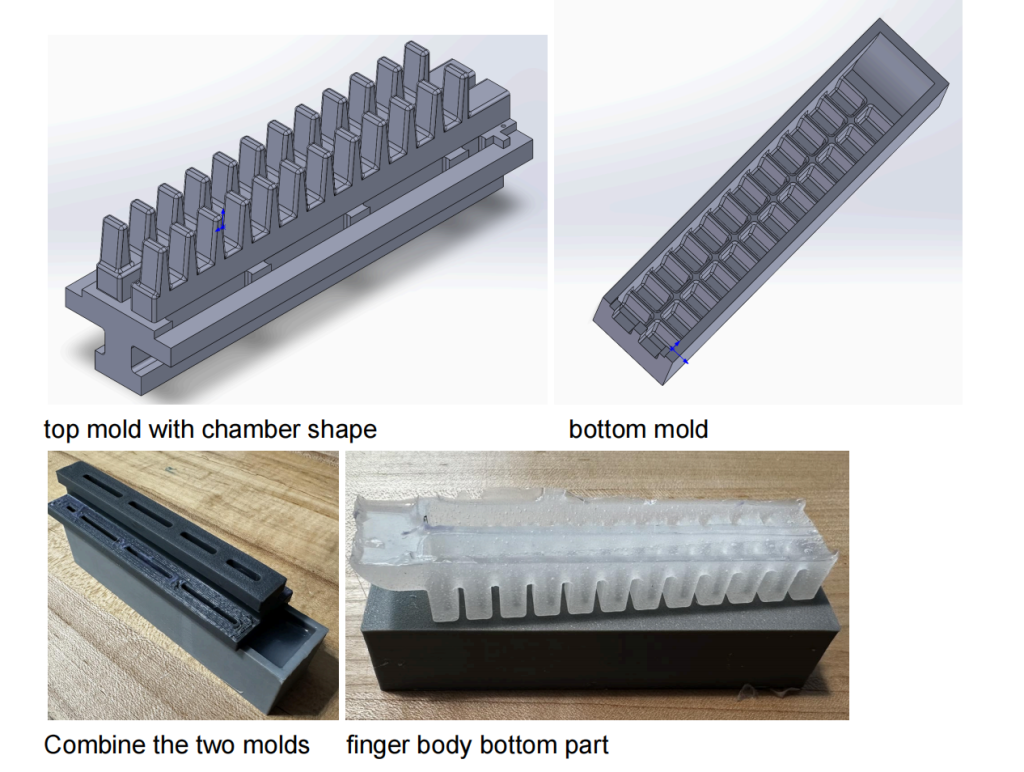
Step 1: Primary Casting (Chamber Formation)
We began by 3D printing a two-part mold consisting of a base and a top mold. The top mold features the negative profile of the air chambers . We poured the silicone mixture into this assembly to cast the “finger bottom,” which establishes the foundational airway structure of the actuator.
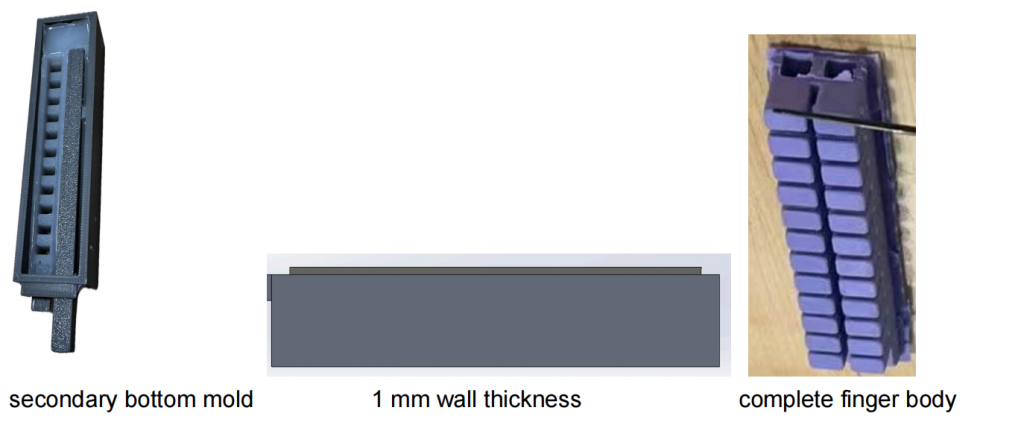
Step 2: Secondary Casting (Encapsulation)
Once the primary part cured, we transferred it into a secondary mold. To prevent the air chambers from collapsing during this step, we inserted rigid rods matching the chamber dimensions into the cavities . This secondary mold is designed to be 1 mm taller than the primary mold. When fresh silicone is poured, it fills this 1 mm gap, creating the outer wall of the finger. This results in a complete, unified finger body with a consistent 1 mm wall thickness.
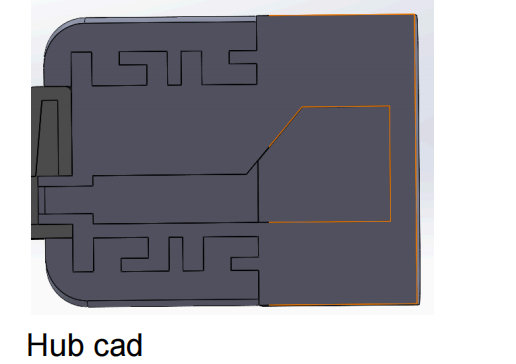
Step 3: build a rigid 3D-printed hub to connect the soft finger and the electronics system
Rigid base Interface:
We integrated a rigid, 3D-printed hub at the base to bridge the gap between the soft finger and the electronics system. This hub serves two main purposes: it provides a solid anchor point for securely mounting the finger to the scaffold without deforming the soft silicone, and it houses the pneumatic fittings to ensure a reliable, airtight connection for the air supply lines. We also upgrade the shape of the connection part to prevent any air gap while the pneumatic system pumps the air into the finger body.
Last step:
To connect the soft finger to this rigid hub, we used a removable “wrap” fixture during the bonding process. This fixture holds the finger body and hub in perfect alignment while the connecting silicone cures, ensuring a leak-proof seal.

Final System Assembly
This fabrication process was repeated to produce three identical actuators. These fingers were mounted to the central plate to form the complete soft robotic hand. Comparison with the initial CAD design confirms that the physical prototype maintains the intended geometric fidelity. The final three-finger configuration provides the stability required to perform the grasping tasks tested in the experimental phase

The electronics subsystem provides the interface between the pneumatic hardware, embedded sensors, and the software control architecture. It enables real-time data acquisition and actuation by combining multiple analog sensors, motor drivers, valves, and an Arduino Mega microcontroller. The electronics design emphasizes modularity, signal stability, and reliable power delivery to support closed-loop pneumatic control.
Power Distribution and Actuation Hardware
A regulated DC power supply drives the pneumatic actuation components, including:
Air Pump-IN motor (responsible for pressurizing the finger)
Air Pump-OUT motor (responsible for depressurization)
Solenoid air valve (for emergency venting and controlled release)
Each pump is connected through an NPN transistor or MOSFET driver circuit, allowing the Arduino Mega to modulate motor power via PWM signals. Flyback diodes are incorporated across pump terminals to protect the circuit from voltage spikes generated by inductive loads. The air valve is similarly controlled through a transistor gate, enabling the microcontroller to open or close the valve at any stage of the control cycle.
This actuation circuitry enables real-time control of pressure dynamics within the silicone chamber, forming the backbone of the dual-pump regulation strategy.

Sensor Integration
The system incorporates three key sensors that provide continuous feedback on the physical state of the soft finger:
1. Force Sensor (FSR)
The FSR measures contact and grasping force at the fingertip. A voltage divider converts resistance changes into a measurable analog voltage, which is read by the Arduino Mega’s 10-bit ADC. This signal allows detection of object contact, monitoring of grasp force, and real-time error computation for the control loop.
2. Flex Sensor
The flex sensor tracks the bending angle of the actuator. Similar to the FSR, it is wired as part of a resistive divider, allowing changes in curvature to be translated into changes in voltage. This measurement contributes to state estimation and safety monitoring, providing redundancy for detecting abnormal actuator deformation.
3. Air Pressure Sensor
A differential air-pressure sensor monitors the internal chamber pressure. Its analog output provides a high-resolution signal that reflects inflation dynamics and helps estimate actuator stiffness and loading conditions. This sensor is essential for stabilizing the pneumatic system and preventing overpressurization.
All three sensors feed into the Arduino’s analog inputs through isolated wiring paths, minimizing electrical noise and ensuring stable readings during pump operation.
Microcontroller Interface and Signal Routing
At the core of the system is the Arduino Mega, chosen for its abundant analog inputs, PWM outputs, and overall stability. The microcontroller performs:
ADC sampling of force, flex, and pressure signals
PWM control of both pumps
Digital switching of the solenoid valve
Coordination of real-time closed-loop control algorithms
A breadboard prototyping layout routes all connections through organized buses for power, ground, and signal separation. This minimizes interference between high-current pump lines and low-voltage sensor circuits. Additional pull-down resistors, filtering capacitors, and signal protection components ensure consistent performance.
System-Level Integration
Together, the electronics subsystem:
Powers and drives the pneumatic pumps
Reads multi-sensor feedback signals
Communicates actuation commands from the software
Enforces safety limits
Maintains stable electrical performance during rapid pressure changes
By integrating pneumatic hardware, sensing elements, and embedded control, the electronics system enables the soft finger to operate as a fully functional closed-loop robotic actuator.
The software subsystem—implemented on an Arduino Mega—forms the core of the system’s real-time adaptive grasping capability. It integrates multi-modal sensing, closed-loop control, and dual-pump actuation into a unified control framework. My primary responsibility in this project was designing and implementing this control architecture, developing the algorithms required for stable grasp regulation, and structuring the embedded software to ensure modularity, robustness, and consistency across all experiments.

Multi-Sensor Data Acquisition and Processing
The software continuously collects data from three embedded sensors:
- Force Sensing Resistor (FSR) for measuring grasp force,
- Flex Sensor for estimating bending angle and actuator configuration,
- Pressure Sensor for monitoring internal air chamber dynamics.
Each sensor is handled by an independent software module that performs calibration, filtering, and conversion from raw ADC values to physical units. These modules operate in non-blocking loops, allowing the system to maintain real-time responsiveness. The processed sensor values serve as feedback inputs for the closed-loop control algorithm.
Closed-Loop Grasp Control Algorithm
I developed a dual-stage closed-loop control strategy that regulates grasp force based on the error between the target and measured values:
Approach Phase
When the measured force is far from the target, a high-power Pump-IN command rapidly inflates the finger to establish contact and generate initial grip.
This phase compensates for system compliance and ensures quick convergence.
Stabilization Phase
As the finger approaches the desired force, the software transitions to fine control using low-power Pump-IN paired with a fixed Pump-OUT level.
This balances internal pressure and reduces oscillations, enabling the system to settle smoothly near the target force.
The algorithm dynamically adjusts pump commands at each cycle based on real-time sensor feedback, effectively linearizing the nonlinear behavior of soft materials and enabling stable, repeatable grasping.
Dual-Pump Actuation and System Supervisory Logic
The Pump-IN and Pump-OUT motors are controlled through PWM signals to achieve variable-speed pressure modulation. I designed the supervisory layer responsible for:
Regulating pump power levels based on error magnitude,
Coordinating inflation and deflation to prevent control conflicts,
Activating an electronic valve for emergency depressurization or end-of-cycle release,
Enforcing pressure safety thresholds to protect hardware.
This supervisory logic ensures robustness under variable load conditions and prevents overpressurization or unstable oscillatory behavior.
Modular and Extensible Software Architecture
To support clarity and future development, I organized the software into independent modules:
FSR Module – calibration, anchoring, continuous force measurement,
Pressure Module – filtering, tare control, status querying,
Flex Module – ADC-to-angle conversion and monitoring,
Motor/Command Module – unified pump control and serial command parsing,
Main Control Loop – sensor fusion and closed-loop regulation.
This modular structure enables straightforward debugging, simplifies experimental tuning, and provides a scalable foundation for future extensions such as model-based control or machine-learning-driven grasp prediction.
Demonstration Videos
This video clip highlights why closed-loop control is necessary for pneumatic soft fingers: even with the same mold, individual silicone fingers can end up with slightly different stiffness and flexibility, so the same pressure level for all fingers command does not produce the same bend angle or contact force. In the video, one finger bends more than intended and exceeds the target grasp force, pushing the object away from the centered grasp point. Using the embedded sensing system (FSR, flex, and internal pressure sensing) and dual-pump actuation, the controller detects the force overshoot and reduces the Pump-IN command (PWM) to lower pressure to the desired contact force for steadier grasping.
This video clip shows the complete grasp sequence driven by the close-loop control system. The fingers first enter an approach phase, where a higher Pump-IN command rapidly inflates the soft fingers to establish contact and build grip. As the measured force approaches the target, the system transitions into a stabilization phase, switching to fine pressure modulation (lower Pump-IN with coordinated Pump-OUT) to settle smoothly at the desired grasp force with minimal oscillation. Finally, the cycle ends by depressurizing the fingers to release the object and return the hand to an open configuration.
Reference
1.S. Abondance, C. B. Teeple and R. J. Wood, “A Dexterous Soft Robotic Hand for Delicate In-Hand Manipulation,” in IEEE Robotics and Automation Letters, vol. 5, no. 4, pp. 5502-5509, Oct. 2020
2.Su, H., Hou, X., Zhang, X., Qi, W., Cai, S., Xiong, X., & Guo, J. (2022). Pneumatic soft robots: Challenges and benefits. Actuators, 11(3), 92.
3.Lyu, B., Xiao, H., Meng, Q., Wu, J., Wang, Y., She, J., & Fukushima, E. F. (2025). Humanoid finger with rigid-flexible-soft structure. Nature Communications, 16, Article 9905.
4.Gelhausen, M. G., Feuerbach, T., Schubert, A., & Agar, D. W. (2018). 3D Printing for Chemical Process Laboratories I: Materials and Connection Principles. Chemical Engineering & Technology, 41(3), 618–627.
5.B. Proper, Y. van de Burgt and I. A. Kuling, “How to Mould, Bond, and Seal Soft Silicone: Practical Solutions to Common Problems,” 2025 IEEE 8th International Conference on Soft Robotics (RoboSoft), Lausanne, Switzerland, 2025, pp. 1-8,
6.Tian, Yingjun, et al. “OpenPneu: Compact platform for pneumatic actuation with multi-channels.” 2023 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). IEEE, 2023.
7.Garcia, M., Contreras Esquen, A., Sabbagh, M., Grace, D., Schneider, E., Ashuri, T., Voicu, R. C., Tekes, A., & Moghadam, A. A. A. (2023). Soft Robots: Computational Design, Fabrication, and Position Control of a Novel 3-DOF Soft Robot.
8.Głowacka, K., Klemenc, J., Nagode, M., & Łagoda, T. (2025). Fatigue lifetime of rubber composites – State-of-the-art. Polymer Testing, 143, 108713.
9.Polygerinos, P., Wang, Z., Overvelde, J. T. B., Galloway, K. C., Wood, R. J., Bertoldi, K., & Walsh, C. J. (2015). Self-sensing soft pneumatic actuators (SenAct) for haptic feedback and force control. Materials & Design, 91, 428–435.
10.Sonar, H. A., Gerratt, A. P., Lacour, S. P., & Paik, J. (2020). Closed-loop haptic feedback control using a self-sensing soft pneumatic actuator. Soft Robotics, 7(1), 22–29.
11.Yuen, M. C., Bilodeau, R. A., & Kramer-Bottiglio, R. (2018). Strain sensor-embedded soft pneumatic actuators and extension and bending feedback. 2018 IEEE International Conference on Robotics and Automation (ICRA), 1–8.
12.Hegde, C., Wang, H., & Majidi, C. (2023). Sensing in soft robotics. Advanced Intelligent Systems, 5(8), 2300099.
13.Gariya, N., Miriyev, A., Li, S., & Lipson, H. (2023). Soft pneumatic actuator with an embedded flexible sensor for real-time curvature and force estimation. Engineering Science and Technology, an International Journal, 40, 101292.
14.Alves, S., Morais, N., Gonçalves, P., Neto, P., & Carvalho, H. (2023). Integrated design, fabrication, and control of a bioinspired soft robotic manipulator. Biomimetics, 8(3), 219
15.Zhang, N., et al. (2025). Soft robotic hand with tactile palm–finger coordination for dexterous manipulation. Nature Communications, 16, 57741.