Moving Hardware

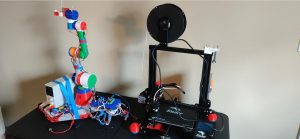
Getting Organized @ Home

Makeshift Lab 🙂

CAD Render of armBOT v1.0

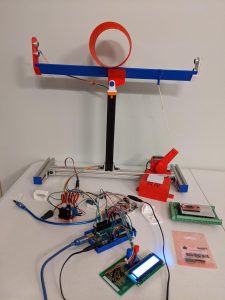
armBOT v1.0

armBOT v1.0 under development
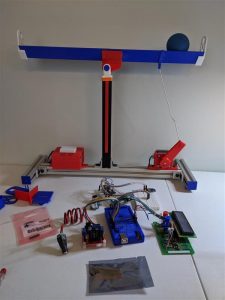
Blue Devils

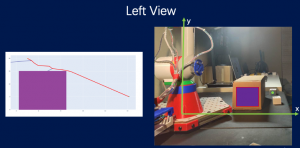
Object Identification using Computer Vision

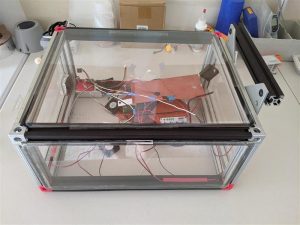
storeBOT: ready to assemble 6 DoF arm

Arm Links Kinematics

Robotic Operating System