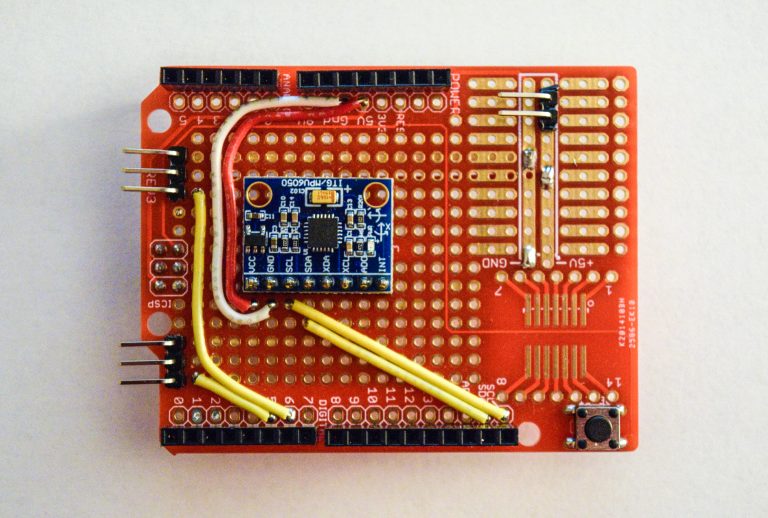
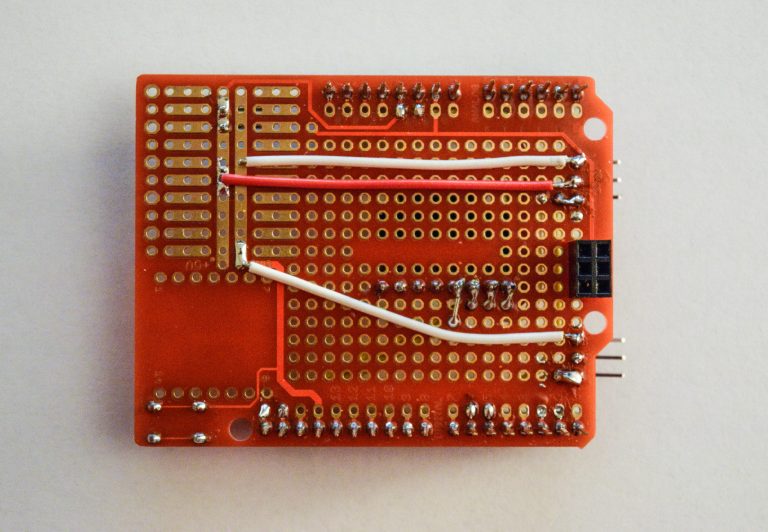
This project will demonstrate the basic electronics, controls, and programming necessary for Proportional-Integral-Derivative (PID) control of nonlinear dynamic systems. It will use a basic microcontroller to think, an accelerometer to know where it is, and motors to move.
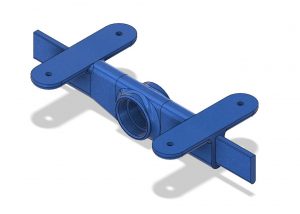
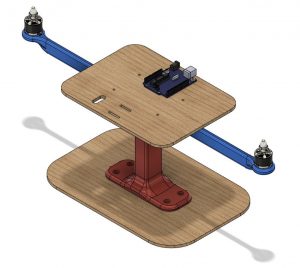
This demonstration consists of a lever with a fulcrum at midspan and two motors attached on either end. The two motors exert vertical thrust forces on either side of the lever, tilting it to one side or the other. The intent is to 1) balance the arm using PID control and 2) have it hold any angle.
Without any feedback or control loops, this nonlinear system will be nearly impossible to balance due to slight dissimilarities between the two sides’ thrusts because of small differences in the friction, motors, length of wires, etc. To truly balance the beam and have it reject disturbances (such as a pencil tap), we need some feedback so that we can adjust how fast the motors spin in real-time.
To provide that feedback, an accelerometer is added to the mix to determine the orientation of gravity. From the measurements of Earth’s gravitational field, we can determine what angle the beam is actually at and how far we are away from where we want it to be. In controls, these values are called: the set-point (where you want to be), the actual (where you are now), and the error (how far away you are). After determining the error from the setpoint, its derivative and integral can be calculated. The value of the error, its integral over time, and its derivative with respect to time can be multiplied by amplification constants, or gains K_p, K_i, and K_d respectively.
For a graphic demonstration of how the system eventually will work, check out the figure below. The setpoint will be an angle, the actual angle will be determined by the accelerometer, and the error is the difference between the actual angle and the setpoint. The “actuating signal” is therefore an angle, but the brushless motors are controlled by pulse-width modulated (PWM) signals (a.k.a. NOT angles). Therefore, the “system” here is a linear transformation from angles to the PWM control signals of the motors.