The MEMS MS Capstone at Duke University

Our project makes use of the Crazyflie 2.1 platform because of it’s unique combination of being open source, light-weight, and versatile in nature. These drones weigh only 27g, are small enough to fit in the palm of a hand, are easy to use and modify, and are great for allowing ease of experiment replication.
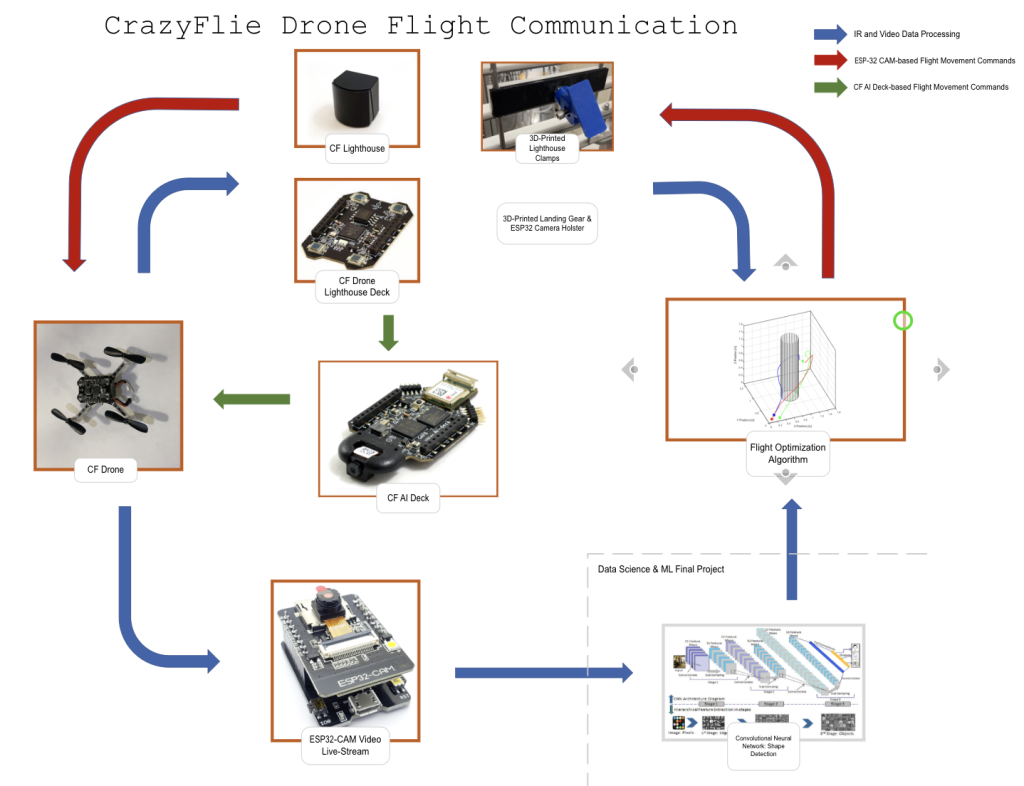
The simplest setup for control is to use one’s phone as the controller by downloading Crazyflie’s app. This provides basic controls with a small amount of tuning, but isn’t very useful for experimenting. By using the Crazyradio PA these drones can communicate with and be controlled by a ground computer. This requires downloading the CrazyFlie Client, which will be discussed in detail in the following section. With radio in place the CrazyFlie drones can be controlled via a gamepad, keyboard, or via code.
To fly autonomously however, without a human using a gamepad or other controller, there must be some sort of positioning system for the autonomous program to determine where the drone is. Bitcraze, the makers of Crazyflie, offer many positioning system options. Their options can be categorized as either absolute positioning, where the controller knows the location of the drone compared to a set defined origin point, or relative positioning, where the controller makes decisions relative to the drone being the origin. An additional category is whether pose estimation happens on board the Crazyflie or off board on a computer. For our project we wanted an absolute positioning system to be able to interact with objects, avoid obstacles, and generally fly around a set environment. We also wanted the capacity for on board pose estimation for higher fidelity towards a final product while also minimize the load on the computer likely to be running an image processing algorithm.
This left us with two options that met both those needs; the Lighthouse positioning system or the Loco positioning system. The Lighthouse system is optical-based, with two or more base stations sending out IR signals that get picked up by receivers on the drone. This allows for very precise positioning indoors for a fraction of the cost of motion capture methods while still enabling on board position acquisition. The Loco system uses ultra wide band radio to communicate between many ground stations and the drone, not unlike a miniature GPS system. Based on our needs for precision and repeatable testing we chose to go with the Lighthouse positioning system.
We then took the following steps to set up the CrazyFlie drones.
- Test the Crazyflie before beginning assembly to ensure it wasn’t damaged in transit.
- Assemble the Crazyflie using the recommended instructions, making sure to use care not to break any components during the process.
- (Optional) If desired, download the Crazyflie app on from either Apple or Google stores, connect the battery wire to the Crazyflie, turn on the drone, pair with your phone, and conduct test flights.
- Remove the battery holder board and replace with the Lighthouse deck.
- Repeat steps one through four for any remaining drones in your swarm.
At this point the Crazyflie drones are ready for use with the Lighthouse base stations. The remainder of this mostly virtual setup will be covered in the following Crazyflie Client section.
-Patrick
Cfclient is the official open-sourced python-based software for the Crazyflie system. It plays a vital role in this project. Read more!
There were two main hardware design needs for this project. First, the Lighthouse basestations needed a custom mounting system to remain locked in place in our test setup. Second, the Crazyflie drones needed to carry an ESP-32 CAM payload they weren’t designed for.
Lighthouse Basestation Mount:
The Lighthouse Base Stations have a threaded hole for being secured, but the included mounts did not meet our needs. We decided to pursue the design of a custom mount, and this design process is documented in the video below.
This led to the final setup pictured below. This consists of the two identical 3d-printed mount pieces, the two 3d-printed hinge parts, 2 3/4 in. #10-24 screws, 2 #10-24 nut, another 3d-printed part that screws into the lighthouse is superglued to exposed face of the 2nd hinge part. This design process was necessary for us to test the system properly and enabled much of the work shown on this website.
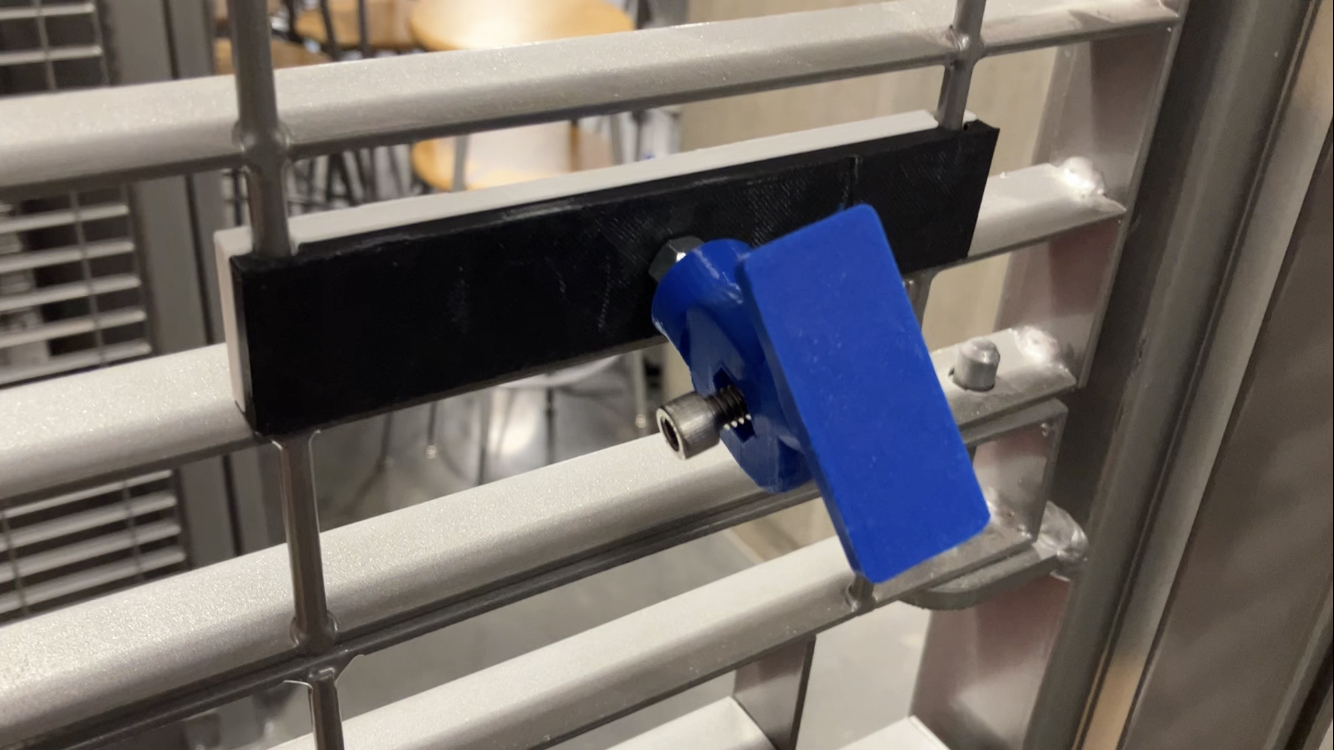
Custom Lighthouse mount 3d-printed and assembled.
Camera Mount:
The second hardware design challenge was of a very different nature, relevant to the project directly via being on-board a drone: making a custom camera mount. This challenge proved difficult most of all due to weight constraints, as although the Crazyflie aerial robots are very versatile, they are ultra lightweight and have very little payload allowance while still being able to lift off the ground and maneuver. The video below dives into this process, specifically how to fit the ESP-32-CAM module onto a Crazyflie drone in a manner that was secure, removable, and under-weight.
This process resulted in a successful payload mount, cutting in at just under 3 grams for the 3d-printed material, and images of what the system looks like integrated with the drone and camera can be seen below.

Four 3d-printed mounts, both with and without support arms for the ESP-32-CAM.

Crazyflie and mounts with camera payload propped up for display to one side.

Crazyflie with camera payload fully set up and ready to fly.
© 2024 Duke MEMS: Experiment Design and Research Methods
Theme by Anders Noren — Up ↑