Developers: Anchi Wu, Emily Hack, Grace Ying, Harrison Ferlauto
Advisor: Laura Juel
Supervising Professors: Kevin Caves, Chelsea Salinas
Abstract
While traumatic brain injury can result in many different symptoms, difficulty controlling body movements (a condition known as ataxia) is a very common consequence. Our client is a young adult who experiences significant ataxia in her upper extremities due to a childhood traumatic brain. As a result, she has trouble eating without assistance. To address this issue, we created a dampened feeding arm system called “The Neater Feeder” that helps reduce her tremors, allowing her to eat more independently.
Introduction and Background
Ataxia, or uncontrolled body movements, can make everyday tasks very difficult [1]. Our client, Mary, has full strength in her arms, but experiences ataxia in the form of severe arm tremors due to a childhood brain injury. This makes it challenging for her to perform basic actions, such as eating. Currently, she requires physical assistance from her mother or caretaker during meals because her arms are subject to spasticity. Mary experiences instability of her right hand when she tries to eat, so she needs help scooping up food off a plate. Mary also cannot smoothly control the motions of her hands, making it difficult for her to accurately place a utensil in her mouth. The severity of Mary’s tremors vary from day to day and become worse as she gets tired. Additionally, Mary spends most of her time in a wheelchair, including meals.
Mary has tried several existing devices to help her eat, such as Liftware [2] and weighted utensils, but nothing has been successful in allowing her to be more independent while eating [3]. Mary’s tremors are too extreme for devices like Liftware that cancel out small motions, and commercial weighted utensils (forks and spoons with large, heavy handles) are uncomfortable and do not help reduce her tremors. Mary and her family are hesitant for her to become fully dependent on an electronic feeding device, such as the Mealtime Partner Dining System or the Obi Robotic Feeding Arm, neither of which require the users to engage their arms [4, 5]. Our project strives to find a middle ground between independent and totally assistive feeding so that Mary can enjoy meals with her family and friends.
Project Goals
The goal of this project is to develop a device to help Mary eat more independently. There are several different components involved in a device that performs this task. For one, the system must help improve the aim of Mary’s right hand (i.e. her ability to bring food from the plate to her mouth without dropping it as a result of her tremors). It must also provide stability to her left arm in order to help stabilize her whole upper body while she eats. Finally, this system must incorporate utensils optimized specifically for Mary and be easily used and cleaned. Overall, this device should allow Mary to eat with little to no assistance by lessening the influence of her tremors.
Design & Development
Our design has four major components: the dampened feeding arm, the left hand peg, the plate rotation and tilt system, and the utensils and utensil attachment system. The dampened feeding arm and the left hand peg both serve the purpose of stabilizing Mary while she eats, and the plate and utensil systems serve to help Mary eat effectively. Currently all components of the device are attached to a wooden base that gets clamped to a table with commercial C-clamps. An image of the device and all its components can be seen in Fig 1. The overall device is 38” long and 16” wide, with a 10” height off the table.
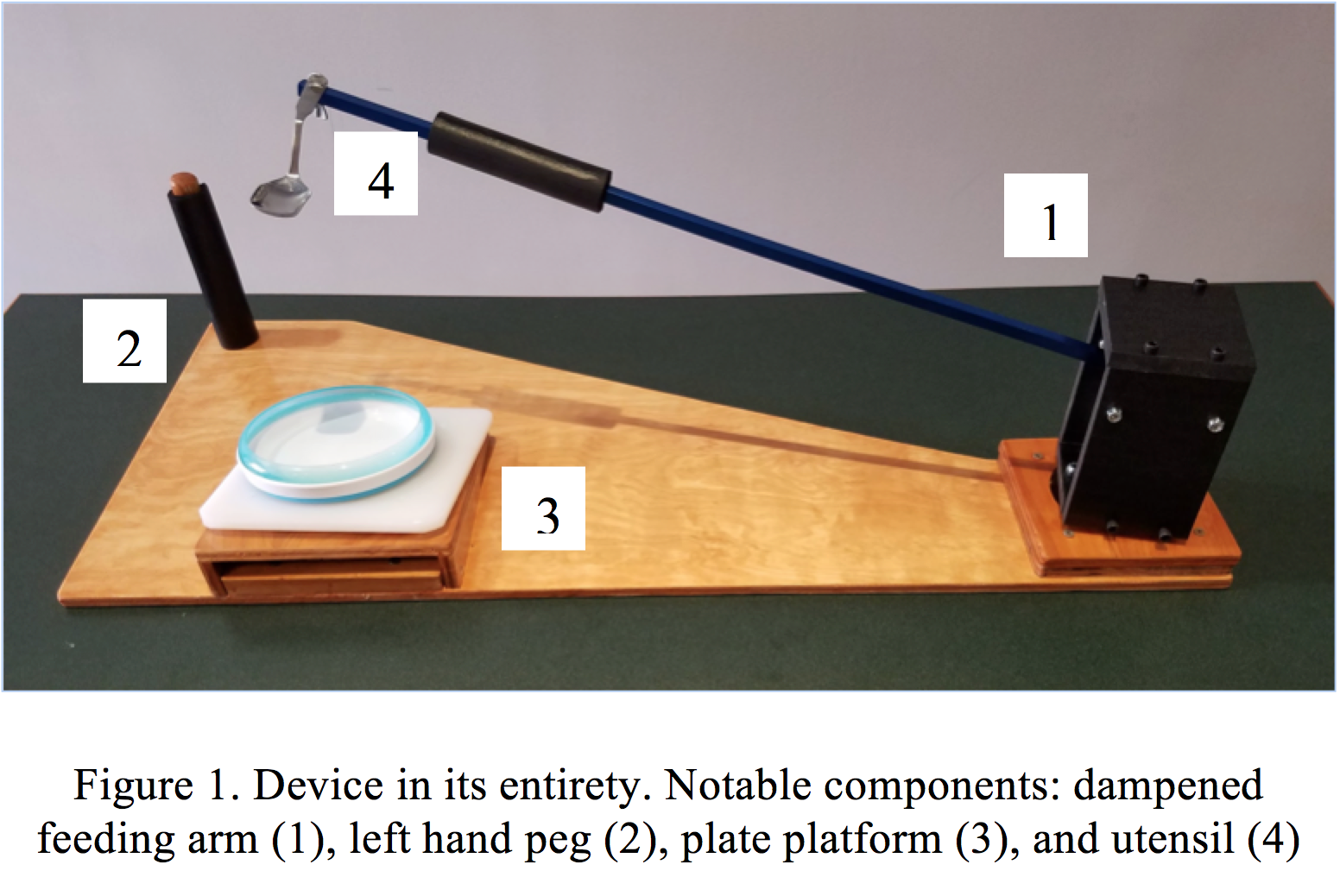 To use this device, Mary holds onto the left hand peg with her left hand and places her right hand on the left end of the dampened feeding arm (where a comfortable foam grip is located). Using her right arm, she can pull the dampened feeding arm towards the plate, scoop up some food, and then bring the dampened arm (and the food on the utensil) up to her mouth. The individual components that enable these functions will be detailed below.
To use this device, Mary holds onto the left hand peg with her left hand and places her right hand on the left end of the dampened feeding arm (where a comfortable foam grip is located). Using her right arm, she can pull the dampened feeding arm towards the plate, scoop up some food, and then bring the dampened arm (and the food on the utensil) up to her mouth. The individual components that enable these functions will be detailed below.
The dampened feeding arm system is composed of a 27” long ½” thick T-shaped aluminum rod and 3 rotary dampers (see Fig. 1). The two ends of the T-shaped part of the bar fit into 0.4” square holes in the center of two of the dampers (McMaster-Carr Rotary Speed Limiter 6597K22, labeled dampers 1 & 2 in Fig. 2), which are housed in a 4-piece Delrin box; the vertical height of these dampers is 6” from the base. Underneath this box is a third rotary damper (McMaster-Carr Rotary Speed Limiter 6597K23) that connects to the base of the unit by a short ½” aluminum T-bar and cap system (see Appendix Fig. B4 for visual description). This damper is attached to the base layer of wood and exposed through a 4” diameter hole in a second layer of wood (a 6” square on the right-most side of the board that provides the Delrin house with a surface on which to rotate).
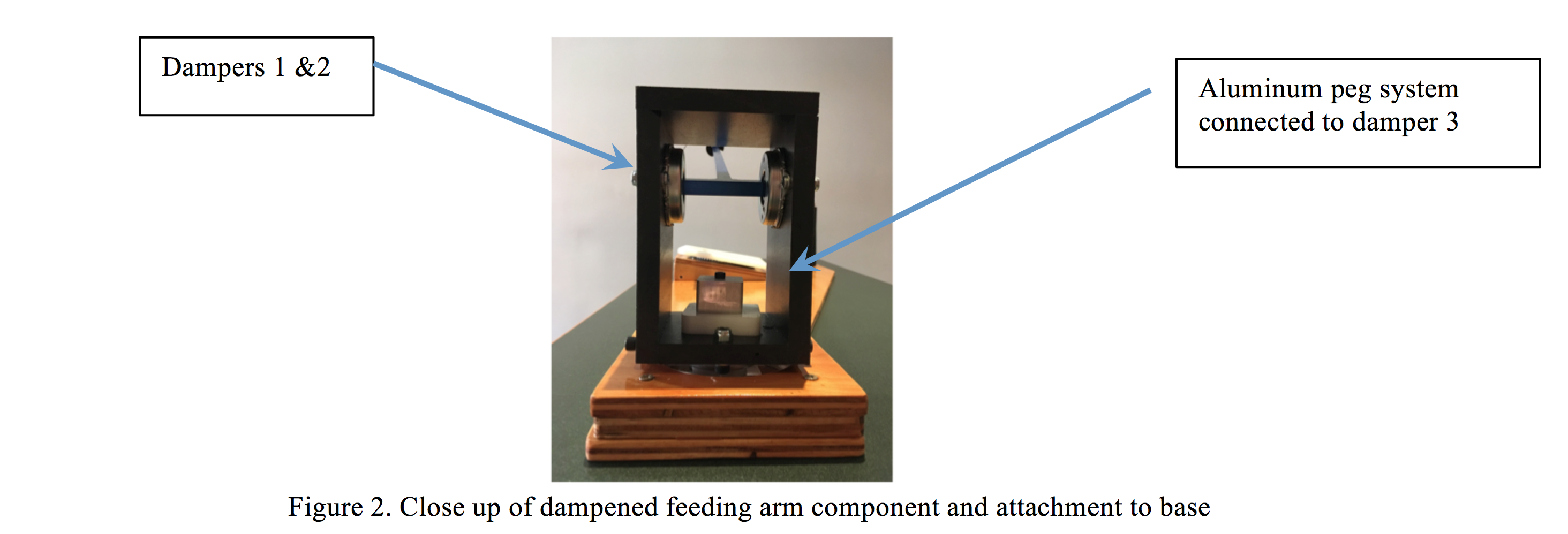 Dampers 1 and 2 resist Mary’s tremors and allow her to move the aluminum bar up and down with minimal shaking. Damper 3 connects the feeding arm to the base of the device while providing controlled horizontal movement for scooping and eating. The length of the feeding arm and the height of the dampers was determined through iterative testing with our client.
Dampers 1 and 2 resist Mary’s tremors and allow her to move the aluminum bar up and down with minimal shaking. Damper 3 connects the feeding arm to the base of the device while providing controlled horizontal movement for scooping and eating. The length of the feeding arm and the height of the dampers was determined through iterative testing with our client.
II. Left hand peg
The left hand peg, which can be seen on the left side of Fig. 1, is composed of a short (approximately 8”) wooden dowel covered in thin foam (so it is comfortable to grasp). The peg is mounted in the far left corner of the device’s base at a distance of 16 inches from the front edge of the base. This component provides Mary’s body with stability while she eats.
III. Plate rotation and tilt
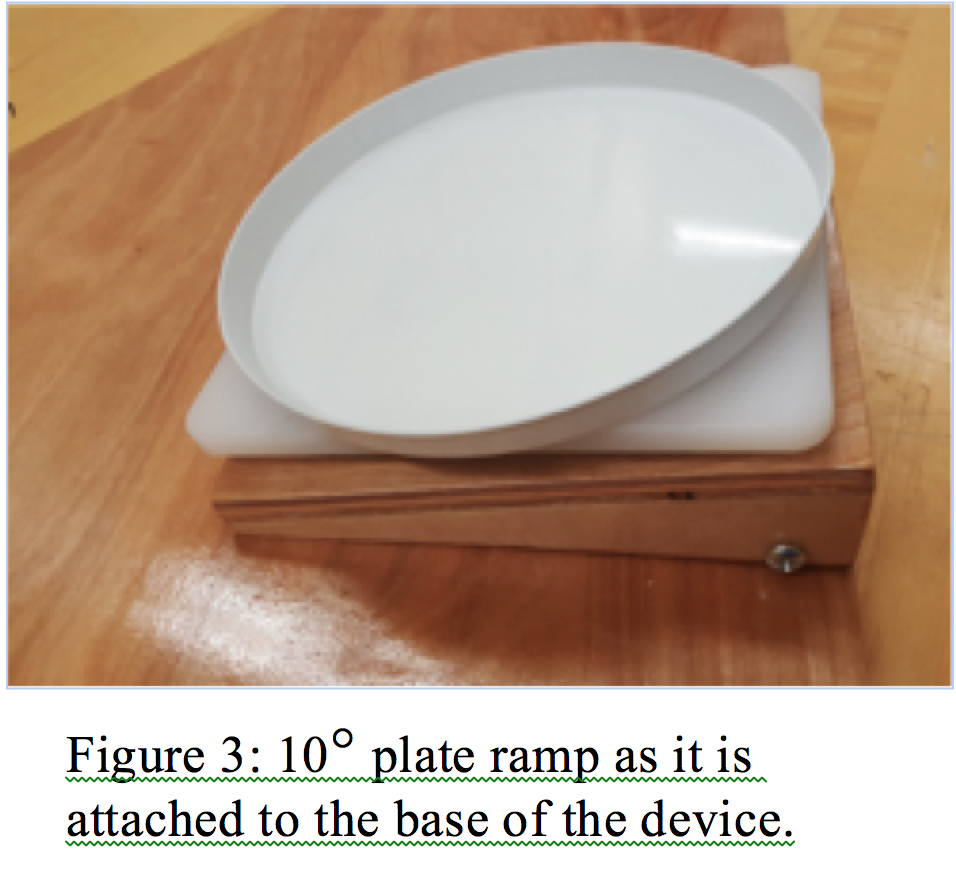 The plate rotation and tilting system is composed of a removable plate platform onto which compatible plates can be mounted (see Fig. 3). Two detachable platforms have been constructed (with 5° and 10° angles of tilt) and can be attached (one at a time) to the base due to the presence of a permanent small wooden block connected to the front of the device. 1” screws can be slipped into aligning holes on the sides of the platforms and the wooden block to prevent the platform from moving during eating. On top of each platform is a lazy Susan (McMaster Lubricated Corrosion-Resistant Turntable 1544T1), which allows for 360° rotation of the plate. On top of the turntable is a cutting board with magnets that align to magnets on the bottom of 4 plates that have been made to attach to this device. Several different types of scoop plates, which have tall rims that improve the user’s ability to scoop food onto a utensil, have been tested so far. The tilt of this component allows Mary to scoop her food more efficiently than a flat plate would, and the rotation component allows Mary to access all of the food on her plate during a meal.
The plate rotation and tilting system is composed of a removable plate platform onto which compatible plates can be mounted (see Fig. 3). Two detachable platforms have been constructed (with 5° and 10° angles of tilt) and can be attached (one at a time) to the base due to the presence of a permanent small wooden block connected to the front of the device. 1” screws can be slipped into aligning holes on the sides of the platforms and the wooden block to prevent the platform from moving during eating. On top of each platform is a lazy Susan (McMaster Lubricated Corrosion-Resistant Turntable 1544T1), which allows for 360° rotation of the plate. On top of the turntable is a cutting board with magnets that align to magnets on the bottom of 4 plates that have been made to attach to this device. Several different types of scoop plates, which have tall rims that improve the user’s ability to scoop food onto a utensil, have been tested so far. The tilt of this component allows Mary to scoop her food more efficiently than a flat plate would, and the rotation component allows Mary to access all of the food on her plate during a meal.
IV. Utensils and utensil attachment system
The utensil component of this device includes both modified utensils and the mechanism by which these  utensils are attached to the dampened feeding arm. Several spoons (referred to as shovel spoons) and forks were altered to improve Mary’s ability to eat with them (see Fig. 4). The shovel spoons were created by cutting off the front edge of soup spoons and hammering their sides to create tall rims. The handle of the spoons were bent so that they can connect horizontally to the aluminum arm and also become flush with the plate during the motion of scooping. The front of the forks were not modified, but their handles were bent in a way that allowed for horizontal attachment to the aluminum arm. The tines of the forks were collectively bent so that they sit at an optimal angle for both stabbing food and placing a fork into a mouth. The utensils all have holes at the top of their handles that allow them to be attached to a hole on the leftmost end of the dampened feeding arm using a screw and a wing nut (see Fig. 5). This provides a sturdy connection between these two components so that the utensils do not accidentally move side to side while Mary eats.
utensils are attached to the dampened feeding arm. Several spoons (referred to as shovel spoons) and forks were altered to improve Mary’s ability to eat with them (see Fig. 4). The shovel spoons were created by cutting off the front edge of soup spoons and hammering their sides to create tall rims. The handle of the spoons were bent so that they can connect horizontally to the aluminum arm and also become flush with the plate during the motion of scooping. The front of the forks were not modified, but their handles were bent in a way that allowed for horizontal attachment to the aluminum arm. The tines of the forks were collectively bent so that they sit at an optimal angle for both stabbing food and placing a fork into a mouth. The utensils all have holes at the top of their handles that allow them to be attached to a hole on the leftmost end of the dampened feeding arm using a screw and a wing nut (see Fig. 5). This provides a sturdy connection between these two components so that the utensils do not accidentally move side to side while Mary eats.
 V. Summary
V. Summary
Each of the four major components of this device plays an essential role in helping our client eat more independently. Together they ensure that Mary can scoop food and bring it to her mouth in a controlled manner with limited assistance from a caretaker. Though specifically designed for our client, this device is relevant to any individual who has difficulty with self-feeding and/or requires physical assistance during meals. This device has the potential to help these individuals regain their independence in eating, resulting in improved self-esteem, better nutrition, and the ability to socialize during mealtime [6-9].
Evaluation
This design was evaluated based on how well it met the following design specifications: allowing the client to eat a 30 minute meal with decreased outside assistance, providing adequate damping and stability, ease of cleaning, setup, and portability, and non-toxicity. Ultimately, the device significantly improves our client’s ability to eat without her caretakers’ assistance by allowing her to take a more independent role in eating. The assessment of the device involved verification analysis by the design team and validation testing by the client and her caretakers. Quantitative analysis of the components and overall device based on each criteria was performed in order to ensure that they do not exceed the determined specifications. To test the device’s ability to decrease external assistance in eating, the client was asked to eat with the device in her home, where it will be most frequently used. She used it to eat for multiple meals and attested to its usability. Our device was shown to reduce outside assistance from 100% to 3.9%. Other aspects of the device, such as cleanability, portability, and ease of setup, were evaluated using questionnaires distributed to the client and her caretakers. Both parties reported high overall satisfaction with the device.
Discussion and Conclusion
This device provides our client with a novel, effective method for self-feeding. Comparatively, it works better than any commercial product she has used in the past. Each of the components of our device serves a specific purpose and was optimized for our client’s ease of use and our design constraints. It was evaluated based on requirements set by our client and her caretakers, and it successfully met each criteria. Our device can be re-built by anyone who should want to with just under $300. Ultimately, we have created a tremor-damping system to help our client eat more independently that we expect to last for many years.
Acknowledgements
We would also like to thank our professors Kevin Caves and Chelsea Salinas, our TA Amitha Gade, our clinical advisor Laura Juel, Greg Bumpass and Steve Earp from the machine shop, Surtronics, Inc., and Mary and her family.
References
1. Diagnosis of Ataxia. (n.d.). Retrieved from https://www.ataxia.org/learn/ataxia-diagnosis.aspx
2. Liftware – Eat with confidence again. (n.d.). Retrieved from https://www.liftware.com/
3. D., V., Briggs, B., L., & Cardella-Turner, C. (n.d.). Good Grips Utensils:Bendable eating utensils. Retrieved from http://www.caregiverproducts.com/good-grips-utensils.html
4. Mealtime Partners, Inc. (n.d.). Retrieved from http://www.mealtimepartners.com/
5. Obi | Robotic feeding device designed for home care. (n.d.). Retrieved from https://meetobi.com/
6. Patrick, H., & Nicklas, T. A. (2005). A review of family and social determinants of children’s eating patterns and diet quality. Journal of the American College of Nutrition, 24(2), 83-92.
7. Speroff, B. A., Davis, K. H., Dehr, K. L., & Larkins, K. N. (2005). The dining experience in nursing homes. NC Med J, 66(4), 292-295.
8. Marshall, D. W., & Anderson, A. S. (2002). Proper meals in transition: young married couples on the nature of eating together. Appetite, 39(3), 193-206.
9. Van Ort, S., & Phillips, L. R. (1995). Nursing interventions to promote functional feeding. Journal of Gerontological Nursing, 21(10), 6-9.
10. WOOD Magazine Staff. (n.d.. Is Your Finish Food Safe? Retrieved from http://www.woodmagazine.com/materials-guide/finishes/is-your-finish-food-safe
11. Health and Safety Guidelines for Metal Cookware & Bakeware. (n.d.). Retrieved from http://cookware.org/fda-coating-compliance-information-2/
12. Vadim, V. (23 September 2015). What’s the safest cookware? Retrieved from http://www.mnn.com/food/healthy-eating/questions/whats-the-safest-cookware
13. Adding Food Contact Materials to the Menu. (n.d.). Retrieved from http://www.dupont.com/products-and-services/plastics-polymers-resins/thermoplastics/uses-and-applications/food-contact-material-products.html
14. RSS™ Structural Screw Test Data. (n.d.). Retrieved from https://www.screwdoctor.com/application/home/selection_guide/technical_data.aspx